<- До підрозділу PLC MachineStruxure Коментувати
Обробка сигналів в контурі регулювання з Toolbox в Machine Expert: теоретичні відомості
Filtering Functions
Глобальний список параметрів (GPL) містить глобальні константи, які використовуються функціональними блоками фільтрації цієї бібліотеки. Параметри можуть редагуватися окремо для кожного застосування, у якому використовується бібліотека. Зміни необхідно виконувати в Library Manager проєкту, у якому ця бібліотека підключена.
| Змінна | Тип даних | Значення за замовчуванням | Діапазон | Опис |
|---|---|---|---|---|
| Gc_uiMaxAvgeSmpl | UINT | 100 | 100…1000 | Максимальна кількість вибірок, що враховуються входом uiSmplCnt |
Filter_AnalogInput: Checking Analog Input Varaibility
Filter_Arithmetic: Giving Arithmetic Mean Value
Filter_MovingAverage: Giving Moving Mean Value
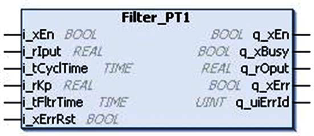
Filter_PT1: Providing PT1 Transfer Function
Функціональний блок Filter_PT1 реалізує передавальну функцію типу PT1. Вихідне значення зростає до 63% від вхідного значення протягом часу, що дорівнює сталiй часу фільтра. Вихідне значення досягає 95% від вхідного значення протягом часу, що дорівнює 3 × сталiй часу фільтра, після чого поступово наближається до 100% вхідного значення.
На рисунку показано профіль зміни виходу функціонального блока Filter_PT1.
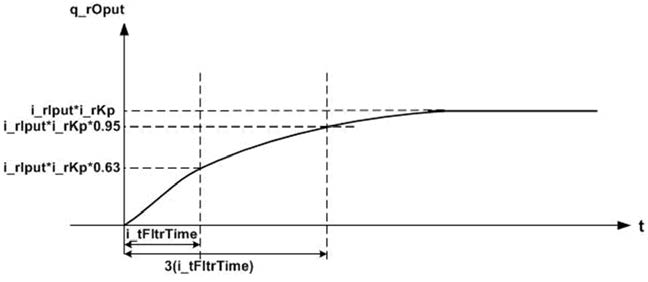
Якщо період дорівнює:
- сталiй часу фільтра, вихідне значення зростає до 63% від вхідного значення;
- трьом сталим часу фільтра, вихідне значення зростає до 95% від вхідного значення, а потім поступово досягає 100% від вхідного значення.
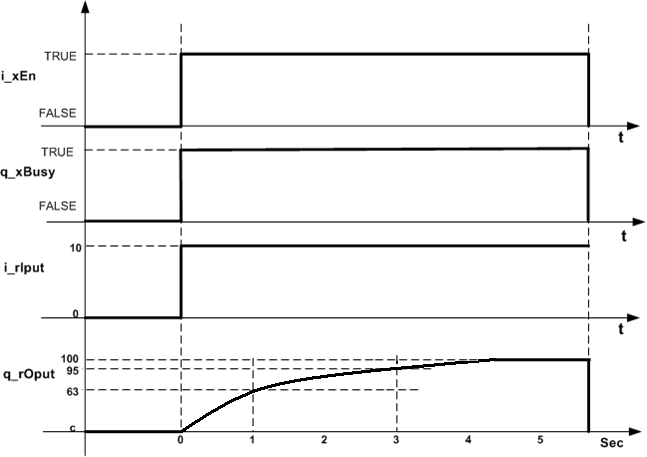
Якщо вхідне значення i_rIput дорівнює 10, а стала часу фільтрації i_tFltrTime становить одну секунду при коефіцієнті підсилення фільтра 10, то вихідне значення q_rOput через одну секунду дорівнюватиме 63. Через три секунди, тобто через 3 × сталу часу фільтра, вихідне значення дорівнюватиме 95, після чого поступово досягне 100. На рисунку показано нормальну поведінку.
Це рівняння показує передавальну функцію: \(G(s) = Kp · 1 / (1 + Ts·s)\) де:
| Позначення | Опис |
|---|---|
| Kp | коефіцієнт підсилення (передавальний коефіцієнт) функції PT1 |
| Ts | стала часу фільтра функції PT1 |
| G(s) | передавальна функція |
Наведене вище рівняння є записом у перетворенні Лапласа для аперіодичної ланки першого порядку, тобто фільтра низьких частот першого порядку. У дискретних системах керування цю функцію часто називають імпульсною передавальною функцією (функція PT1).
функціональний блок потребує періодичного виклику, а сам період з яким він викликається задається у вхідному параемтрі i_tCyclTime.
Некоректні параметри, такі як i_tCyclTime = 0 або i_tFltrTime < i_tCyclTime, призводять до виявлення помилки та формування відповідного ідентифікатора помилки. Під час стану виявленої помилки вихід встановлюється в нуль. Стан помилки може бути скинутий лише по фронту наростання входу i_xErrRst.
Як показано на діаграмі виходів функціонального блока, сигнал q_xBusy має значення TRUE, коли функціональний блок активований і відсутня виявлена помилка.
У наступній таблиці описано вихідні контакти функціонального блока Filter_PT1.
| Вхід | Тип даних | Опис |
|---|---|---|
| i_xEn | BOOL | TRUE: увімкнено FALSE: вимкнено |
| i_rIput | REAL | Вхідне значення для обробленняДіапазон: ±3.4e+38 |
| i_tCyclTime | TIME | Час циклу задачі Діапазон: 0…4294967295 мс i_tCyclTime < 0 призводить до виявлення помилки |
| i_rKp | REAL | Коефіцієнт підсилення (Kp) функції PT1Діапазон: ±3.4e+38 |
| i_tFltrTime | TIME | Стала часу фільтра Діапазон: 0…4294967295 мс Заводське налаштування: t#0msi_tFltrTime < i_tCyclTime призводить до виявлення помилки |
| i_xErrRst | BOOL | TRUE: скидання виявленої помилки (по фронту наростання)(Необов’язковий вхід) |
У таблиці нижче описано вихідні контакти функціонального блока Filter_PT1:
| Вихід | Тип даних | Опис |
|---|---|---|
| q_xEn | BOOL | TRUE: увімкненоFALSE: вимкнено |
| q_xBusy | BOOL | TRUE: активний і відсутня виявлена помилкаFALSE: вимкнено або виявлена помилка |
| q_rOput | REAL | Вихідне значенняДіапазон: ±3.4e+38 |
| q_xErr | BOOL | TRUE: виявлена помилкаFALSE: помилки не виявлено |
| q_uiErrId | UINT | Номер виявленої помилки, якщо встановлено вихід помилки:0: помилки не виявлено1: некоректний параметр i_tCyclTime < 02: некоректний параметр i_tFltrTime < i_tCyclTime |
Програма формує синусоїдальний сигнал із заданим періодом (5 секунд / 0,2 Гц) та синусоїдальний сигнал із частотою, більшою на одну декаду (0,5 секунди / 2 Гц).
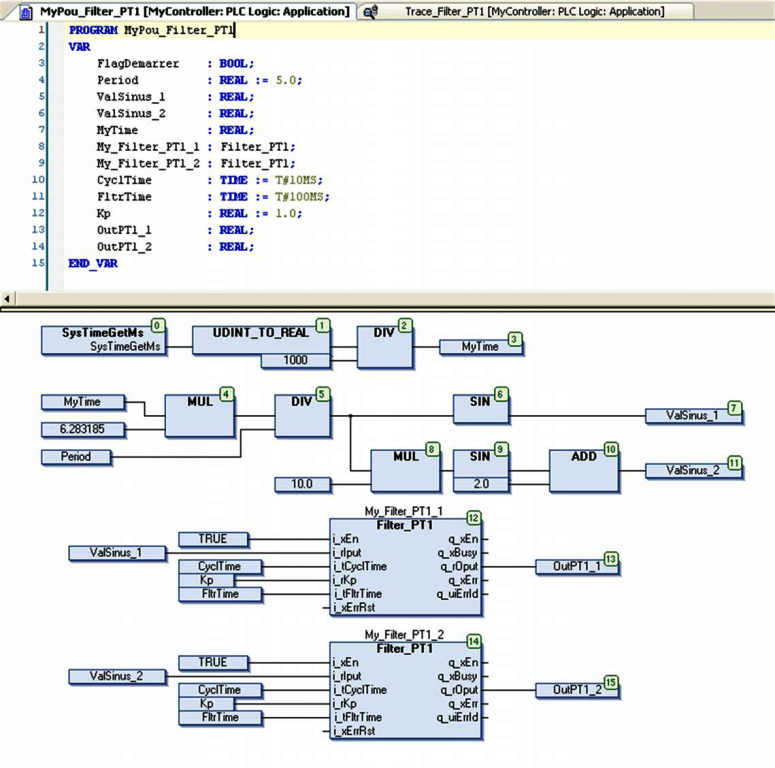
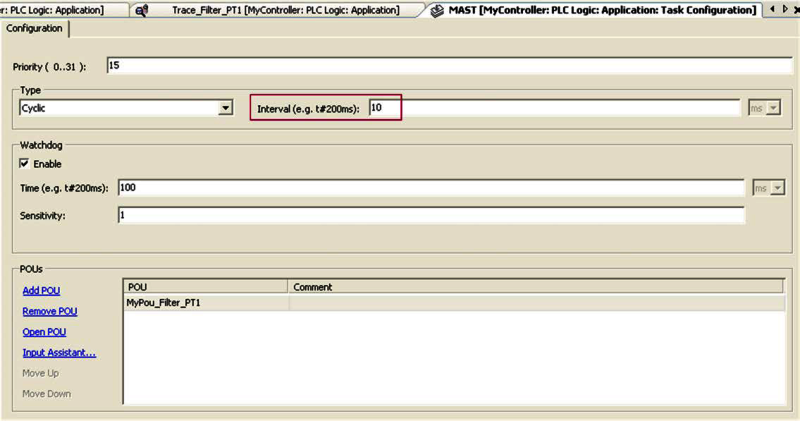
Вхід i_tCyclTime функціонального блока Filter_PT1 повинен мати точно таке саме значення, як і період виконання POU у задачі MAST, у цьому випадку 10 мілісекунд (див. область, виділену червоною рамкою).
Результат роботи попереднього POU, коли вхід i_tFltrTime дорівнює 100 мс:
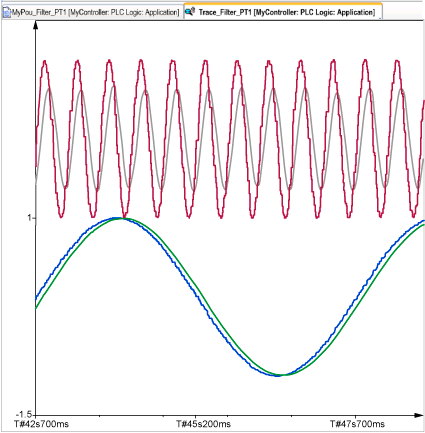
Синій — синусоїдальний сигнал i_rIput із частотою 0,5 Гц (функціональний блок My_Filter_PT1_1)
Зелений — відфільтрований сигнал q_rOput (функціональний блок My_Filter_PT1_1)
Червоний — синусоїдальний сигнал i_rIput із частотою 5 Гц (функціональний блок My_Filter_PT1_2)
Сірий — відфільтрований сигнал q_rOput (функціональний блок My_Filter_PT1_2)
Результат роботи попереднього POU, коли вхід i_tFltrTime дорівнює 500 мс:
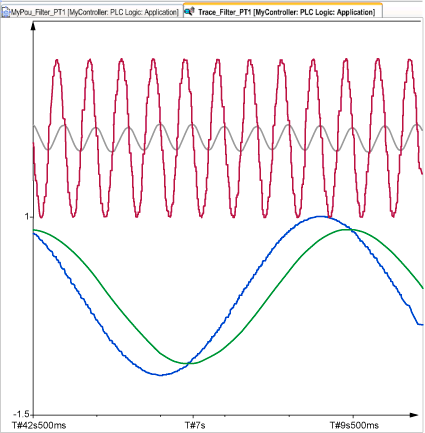
Синій — синусоїдальний сигнал i_rIput із частотою 0,5 Гц (функціональний блок My_Filter_PT1_1)
Зелений — відфільтрований сигнал q_rOput (функціональний блок My_Filter_PT1_1)
Червоний — синусоїдальний сигнал i_rIput із частотою 5 Гц (функціональний блок My_Filter_PT1_2)
Сірий — відфільтрований сигнал q_rOput (функціональний блок My_Filter_PT1_2)
Імітаційна модель об’єкта в Machine Expert з використанням Filter_PT1: практична частина
Джерела
Автори
Теоретичне заняття розробив Олександр Пупена.
Feedback
Якщо Ви хочете залишити коментар у Вас є наступні варіанти:
Про проект і можливість допомогти проекту написано тут