<- До підрозділу PLC MachineStruxure CODESYS (загальна) Коментувати
Програмні сутності в Machine Expert і CODESYS: практична частина
Тривалість: 4 год
Мета: Набути практичних навичок створення, використання та тестування програмних сутностей в середовищі EcoStruxure Machine Expert (або CODESYS), зокрема програм (POU), функцій та функціональних блоків, а також застосування стано-орієнтованого підходу до побудови алгоритмів керування машиною.
Лабораторна установка.
Необхідне апаратне забезпечення. Для проведення лабораторних робіт необхідно мати комп’ютер з наступною мінімальною апаратною конфігурацією:
- CPU Intel/AMD 2 ГГц / RAM 16 ГБ / Диск 20 ГБ (вільних)
Необхідне програмне забезпечення.
- EcoStruxure Machine Expert або CODESYS
Загальна постановка задачі.
Цілі роботи:
1) Підготувати робоче середовище та створити проєкт для PLC M241. 1) Розробити власну програму (POU) на мові LD для реалізації задачі керування процесом наповнення. 1) Сформувати методику перевірки роботи програми (табличну та сценарну). 1) Реалізувати модифікацію алгоритму із використанням таймерів та перевірити граничні умови їх спрацювання. 1) Створити власну функцію масштабування аналогового сигналу та перевірити її роботу в емуляції. 1) Реалізувати користувацький функціональний блок керування клапаном з автоматом станів і обробкою тривог. 1) Застосувати стано-орієнтований підхід для реалізації автомату станів машини наповнення. 1) Провести тестування програмних компонентів в режимі емуляції PLC. 1) Виконати експорт функції та функціонального блоку у форматі PLCopenXML.
Порядок виконання роботи
Пререквізити
- Для виконання практичного завдання необхідно Machine Expert або CODESYS. Інсталюйте його, як це описано в Встановлення середовища, створення та запуск проєкту EcoStruxure Machine Expert
- На Google диску створіть папку з назвою
MyLabs, якщо вона ще не створена, а в ній створіть папкуLabPou. Посилання на папкуMyLabsнеобхідно переслати викладачу для звітності. -
Передбачається, що здобувач знайомий з матеріалами лекцій:
- Робота з даними в Machine Expert: теоретична частина
- Програмні сутності POU в в Machine Expert: теоретична частина
- Функціонування, операційні режими, задачі ПЛК в Machine Expert
- Організація пам’яті в M241: теоретична частина : теоретична частина
- Програмування на мові ST в CODESYS: теоретична частина
1. Програми
- Ознайомтеся з рекомендаціями щодо розробки та налагодження програм, наведених в Програмування та налагодження в ПЛК M221: практична частина
1.1. Аналіз постановки завдання для написання власної POU
- Ознайомтеся з умовою задачі, наведеної нижче. Ця задача взята з книги Petruzella F. D. Programmable Logic Controllers: 2025 Release ISE. McGraw Hill, 2025.
На рисунку 1 показано ескіз процесу безперервного наповнення з бункеру (Hopper). Цей процес вимагає, щоб коробки, які рухаються по конвеєру, автоматично позиціонувалися та заповнювалися. Послідовність роботи процесу безперервного наповнення така:
- Запустити конвеєр, коли кнопка запуску
Startкороткочасно натиснута. - Зупинити конвеєр, коли кнопка зупинки
Stopкороткочасно натиснута. - Увімкнути індикатор стану роботи
Run, коли процес виконується. - Увімкнути індикатор режиму очікування
Standby, коли процес зупинений. - Зупинити конвеєр, коли правий край коробки вперше зафіксовано фотодатчиком (
Photo switch). - Коли коробка в позиції і конвеєр зупинений, відкрити електромагнітний клапан (
Solenoid) і дозволити наповнення коробки. Наповнення має припинитися, коли датчик рівня (Level switch) стане істинним. - Увімкнути індикатор повної коробки (
Full), коли коробка заповнена. Індикатор має залишатися увімкненим, доки коробка не буде переміщена за межі фотодатчика.
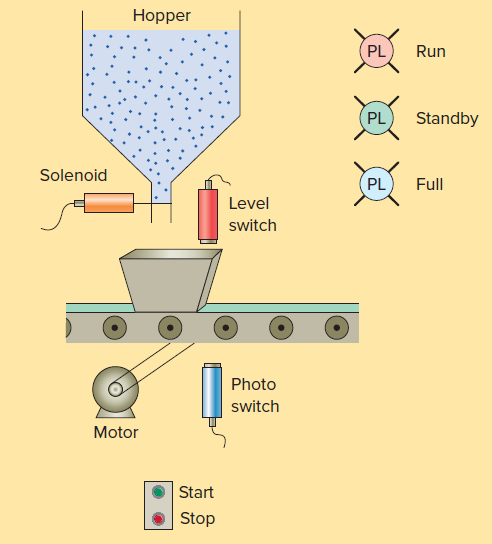
рис.1. До постановки задачі (Джерело: Petruzella F. D. Programmable Logic Controllers: 2025 Release ISE. McGraw Hill, 2025.)
Рисунок 2 показує програму релейно-контактної логіки, необхідну для виконання цієї операції.
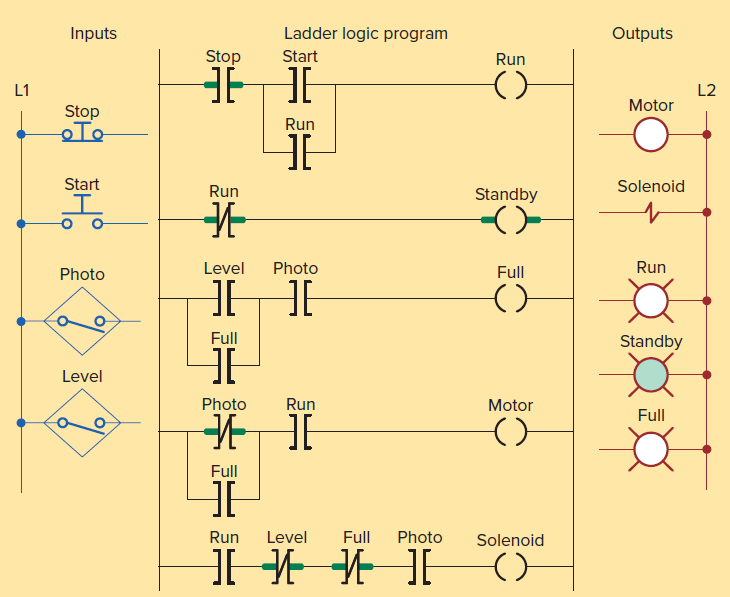
рис.2. PLC-програма безперервної операції наповнення (Джерело: Petruzella F. D. Programmable Logic Controllers: 2025 Release ISE. McGraw Hill, 2025.)
1.2. Визначення необхідних входів виходів
- Визначте перелік змінних необхідних для реалізації задачі та вимоги до них.
- У папці
LabPouна Google диску створіть файл GoogleSheet з назвоюtables, на листі з іменемvarsта сформуйте в ньому перший варіант таблиці 1, без заповнення поляЗмінна. Рекомендації щодо наповнення наведені в Програмування та налагодження в ПЛК M221: практична частина
Таблиця 1.Перелік змінних та вимоги до них.
| Змінна | Позначення параметру | Діапазон зміни | Діапазон сигналу на/з ПЛК | Вхід/вихід ПЛК | Примітка |
|---|---|---|---|---|---|
bStart |
Кнопка Start1 |
вкл/відкл | Вкл.=24В, Відкл=0 | I0 | вмикається людиною, без фіксації |
| … |
- Прочитайте рекомендації щодо найменування змінних в угорській нотації, як це описано в Підходи до найменування сутностей в програмах PLC
- Сформуйте назви змінних та заповніть поле
Зміннав таблиці 1.
1.3. Розробка методики перевірки
Методика перевірки передбачає опис процедур, які необхідно зробити, щоб перевірити чи відповідає виконання програми заданим в завданні умовам. Перший варіант методики перевірки розробляють ще до написання програми користувача. Методика дає можливість розробнику не тільки перевірити правильність виконання програми користувача, але і зрозуміти усі тонкощі алгоритму.
Дана задача має залежність як від входів системи так і від стану. Рішення, яке наведено на рис 2, включає логіку керування виходами, що зав’язана як на стані входів так і виходів, якими керує ПЛК (наприклад Full і Run). Тому для врахування всіх комбінацій, враховуючи що вхідних дискретних сигналів 4, + 2 вихідних сигнали задіяні як входи в логіці необхідно врахувати $2^6$ , тобто 64 комбінацій. Це досить громіздка таблиця, тому необхідно зробити певну декомпозицію.
Аналізуючи задачу та її рішення можна виділити зв’язні частини:
- $Run = f (Start,Run,Stop)$
- $Standby=f(Run)$
- $Full=f(Level,Full,Phjoto)$
- $Motor=f(Photo,Run,Full)$
- $Solenoid = f(Run,Level,Full,Photo)$
Маючи такі однозначні залежності виходів від входів, можна зробити кілька таблиць перевірки, саме там де вони потребуються (для Standby вихід очевидний).
- У GoogleSheet
tablesстворіть листcheck1, заповніть таблиці для перевірки виходів за шаблоном таблиці 2, для формування методики перевірки задачі. Замість назв входів та виходів в заголовку таблиці, які зараз взяті з опису в задачі, вставте назви змінних з таблиці 1.
Таблиця 2. Табличний вигляд методики перевірки роботи задачі
| № | Run | Photo | Level | Full | Стан системи | Solenoid | Примітка |
|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 | Всі входи відключені | 0 | |
| 2 | |||||||
| 3 | |||||||
| 4 | |||||||
| 5 | |||||||
| 6 | |||||||
| 7 | |||||||
| 8 | |||||||
| 9 | |||||||
| 10 | |||||||
| 11 | |||||||
| 12 | |||||||
| 13 | |||||||
| 14 | |||||||
| 15 | |||||||
| 16 |
1.4. Створення проєкту та реалізація задачі
- Запустіть Machine Expert. Створіть новий проект на базі M241 з назвою
POU_labs -
У конфігурації PLC змініть найменування входів та виходів PLC, відповідно до таблиці 1.
- Створіть POU типу Program з назвою
Hopperна мові ST. Добавте її до обробки в задачі MAST - У межах POU створіть Action з назвою
Simpleverна мові Ladder (LD2) та зробіть виклик з POUHopper
Simplever();
- Реалізуйте програму, наведену на рис.2.
- Зробіть компіляцію та за необхідності виправте усі помилки.
1.5. Перевірка роботи програми користувача
-
Переключіть середовище в режим імітації. З’єднайтеся з емулятором ПЛК, завантажте програму та запустіть її на виконання.
-
Добавте в Watch List необхідні змінні входів та виходів.
-
Перевірте роботу програми згідно методики перевірки, яка наведена в таблиці 2
1.6. Модифікація програми користувача
-
Модифікуйте програму, добавивши нові умови:
- 2-секундну затримку перед початком наповнення коробки після зупинки конвеєра.
- 4-секундну затримку перед запуском конвеєра після заповнення коробки.
Тепер завдання вже передбачає наявність стану і перевіряти її через таблицю 2 немає можливості. Наразі можна зробити перевірку на граничних умовах спрацювання таймерів. Для даної задачі окремо перевіряється:
-
2-секундна затримка перед відкриттям клапана: після зупинки конвеєра Solenoid не повинен вмикатися раніше ніж через 2 с.
-
4-секундна затримка перед запуском конвеєра: після заповнення коробки Motor не повинен запускатися раніше ніж через 4 с.
Перевірка виконується через часові діаграми або покрокове моделювання в режимі імітації з контролем змінних IN, ET та Q таймерів.
- Зробіть перевірку модифікованої програми.
-
Зробіть копії екранів для звіту. Сформуйте в папці лабораторної роботи файл гугл документу і розмістіть в ньому копії екранів.
- Збережіть та закрийте проєкт.
2. Функції
2.1. Аналіз постановки завдання для написання власної функції
У цій частині лабораторної роботи необхідно реалізувати власну функцію для масштабування.
- Розгляньте постановку завдання нижче для функції, яка має виконувати масштабування вимірюваного значення з аналогового входу в інженерні одинці.
Враховуючи що вимірювальне значення отримується з аналогового входу через змінну з каналу IW в цілочисельному форматі (наприклад в діапазоні 0-10000), при відображенні оператору воно неінформативне. Для відображенні на засобах людино-машинного інтерфейсу (ЛМІ), наприклад панелях оператора чи комп’ютері, його необхідно перетворити в інженерні одиниці. Таке перетворення прийнято називати масштабуванням. Як правило, засоби ЛМІ вміють робити лінійне масштабування, однак інколи необхідно це робити на самому ПЛК.
Лінійне масштабування, тобто перетворення вхідних сирих одиниць у інженерні масштабовані може проводитися за формулою (див. рис.3):
S = k*R + Sb (1)
де S – отримуване масштабоване значення в інженерних одиницях; R – вхідне сире немасштабоване значення, Sb – зміщення; k – коефіцієнт, який дорівнює тангенсу кута нахилу прямої масштабування до осі абсцис.
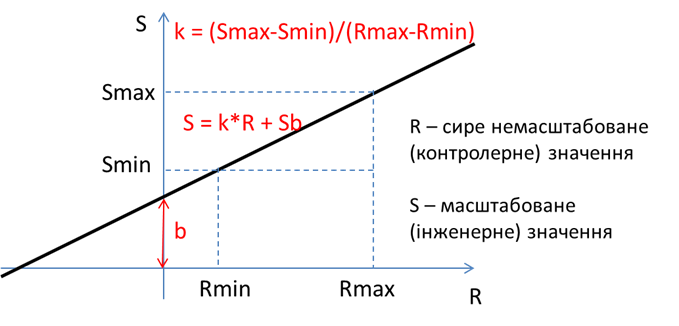
рис.3. Лінійне масштабування
Задавання масштабування у вигляді (1) вимагає від розробника додаткових розрахунків. Замість цього зручніше задавати тільки мінімальні та максимальні межі для сирого (raw) і масштабованого (scaled) значення. На рис.3 межі сирого значення показані як Rmax та Rmin, а масштабованого як Smax та Smin. Так, наприклад, якщо в ПЛК значення від датчика задається в діапазоні від 0-10000 (одиниць ПЛК) а на ЛМІ воно повинно відображатися як 50.0-150.0 (°С), то:
Rmin = 0 (одиниць ПЛК) –> Smin = 50.0 (°С)
Rmax = 10000 (одиниць ПЛК) -> Smax = 150.0 (°С)
Формула визначення S з використанням змінних діапазонів матиме вигляд:
S = Smin + (R-Rmin)(Smax-Smin)/(Rmax-Rmin) (2)
2.2. Визначення параметрів власної функції
- Проаналізуйте які параметри необхідні для наведеної вище функції, як це розглянуто нижче.
Параметрами функції будуть усі необхідні вхідні значення, потрібні для масштабування:
RAW- сире значення вимірювальної величини типуINTRMIN- нижня межа сирого значення вимірювальної величини типуINTRMAX- верхня межа сирого значення вимірювальної величини типуINTSMIN- нижня межа масштабованого значення величини типуREALSMAX- верхня межа масштабованого значення величини типуREAL
Виходом функції буде масштабоване значення типу REAL.
У процесі розрахунку необхідно робити проміжні перетворення. Зокрема, треба перетворити цілі числа у дійсні, щоб зробити арифметичні операції, наведені в формулі (2), тому що не дозволяється робити обчислення з різними типами.
2.3. Реалізація функції
- Створіть новий проєкт з назвою
MyLibна базі M421. - Добавте нову функцію з назвою
SCALEі мовою ST та виходом типу REAL.
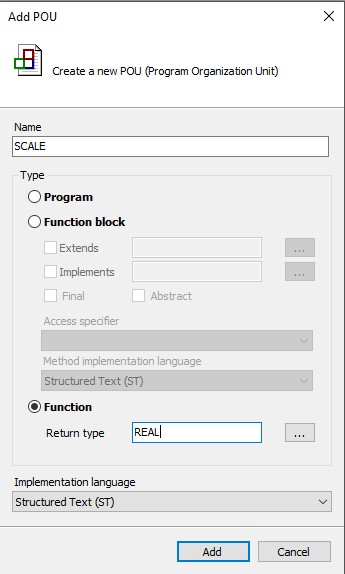
рис.4.
Функції можна реалізовувати і в застосунку контролера, однак якщо вона буде використовуватися в кількох ПЛК проєкту, варто її розміщувати в Global.
- Переключіть область означення змінних в текстовий вигляд і внесіть туди наступні параметри:
FUNCTION SCALE : REAL
VAR_INPUT
iRaw : INT; //сире значення вимірювальної величини
iRmin: INT := 0; //нижня межа сирого значення вимірювальної величини
iRmax: INT := 10000; //верхня межа сирого значення вимірювальної величини
rSmin: REAL := 0.0; //нижня межа масштабованого значення величини
rSmax: REAL := 100.0; //верхня межа масштабованого значення величини
END_VAR
VAR
rRaw, rRmin, rRmax : REAL; // для перетворення типів
rK: REAL; //проміжний коефіцієнт
END_VAR
- У область коду впишіть наступний код:
rRaw := INT_TO_REAL (iRaw);
rRmin := INT_TO_REAL (iRmin);
rRmax := INT_TO_REAL (iRmax);
rK := (rSmax-rSmin)/(rRmax-rRmin);
SCALE := rSmin + rRaw*rK;
- Проаналізуйте реалізовану програму, перевірте на наявність помилок в ній (як логічних так і синтаксичних) та внесіть зміни в коді за необхідності.
2.4. Перевірка роботи функції
- У апаратній конфігурації проєкту для PLC добавте картридж на два аналогові входи і сконфігуруйте один на 4-20 мА а другий на 0-10В (рис.5).
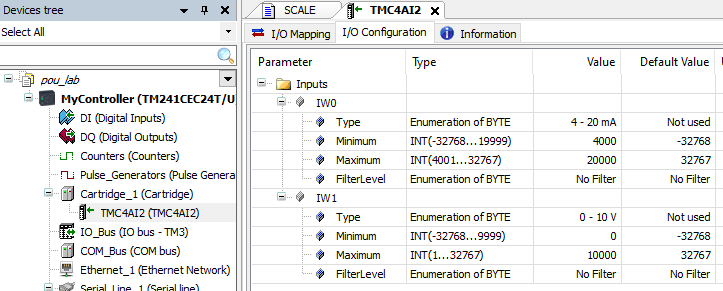
рис.5.
-
Створіть нову програмну POU
Check_FN, добавте її виклик в задачу MAST та добавте дві локальні змінні.rTemperature: REAL; rPressure: REAL; -
Використовуючи IOMapping назначте назви для вхідних змінних каналів
IW0таIW1в яких би були зазначені унікальні назви. Напишіть код програми для масштабування, наприклад:
rTemperature := scale(iiTMC4AI2_IW0,4000,20000,0,150);
rPressure := scale(iiTMC4AI2_IW1,0,10000,0.0,10.0);
- Переведіть середовище в режим емуляції, з’єднайтеся з емулятором ПЛК, звантажте проєкт в ПЛК і запустіть програму на виконання.
- Створіть таблицю перевірки для кожного зі значень (rTemperature та rPressure)
Таблиця 3.
| Відсоток діапазону | Сире значення в одиницях ПЛК | Масштабоване значення |
|---|---|---|
| 0% | ||
| 100% | ||
| 50% | ||
| 10% |
-
Використовуючи створені таблиці перевірте правильність роботи функції. Якщо вона працює неправильно, поверніться до попереднього пункту і перевірте код на помилки.
-
Зробіть копії екранів з реалізацією функції, програмою де вона використовується та watch таблиці в якій показані вхідні та вихідне значення. Занесіть це у звіт у гугл документі.
2.5. Експортування функції
- Через контекстний пункт меню
PLCOopenXMLExportзробіть експортування функції в окремий файл -
Використовуючи браузер, редактор XML або текстовий редактор подивіться зміст експортованого файлу
- Збережіть проєкт.
3. Функціональні блоки
3.1. Постановка і декомпозиція завдання для створення користувацького ФБ
- Розгляньте приклад створення та використання функціональних блоків користувача для керування клапаном або засувкою з пневмоциліндром, наведений в даному пункті.
Необхідно розробити функціональний блок для керування клапанами або засувкою з пневмоциліндром, що має датчики кінцевого положення. Необхідно реалізувати:
- окремі режими ручний/автомат:
- передбачається окрема булева змінна (АВТ/РУЧ) для керування режимом з засобів людино-машинного інтерфейсу
- передбачається окрема булева змінна для ВКЛ/ВІДКЛ клапану у ручному режимі з засобів людино-машинного інтерфейсу
- передбачається окрема булева змінна для ВКЛ/ВІДКЛ клапану у автоматичному режимі з програми користувача
- для клапанів використовувати керування одним дискретним виходом: ВКЛ - на відкриття, ВІДКЛ - на закриття
- передбачити використання 2-х датчиків кінцевого положення: позиція “відкритий” і “закритий”
- контроль стану клапану (див. рис.6) з метою відображення його на засобах людино-машинного інтерфейсу різними кольорами:
- відкривається - проміжний стан, коли йде сигнал на відкриття, але кінцевик ВІДКРИТО ще не спрацював
- закривається - проміжний стан, коли йде сигнал на закриття, але кінцевик ЗАКРИТО ще не спрацював
- відкрито - кінцевий стан, коли йде команда на відкриття і спрацьовує кінцевик ВІДКРИТО, при цьому кінцевик ЗАКРИТО відключений
- закрито - кінцевий стан, коли йде команда на закриття і спрацьовує кінцевик ЗАКРИТО, при цьому кінцевик ВІДКРИТО відключений
- при включенні ПЛК переходити у один з проміжних станів, в залежності від команди
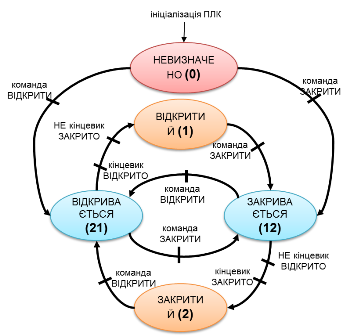
рис.6. Діаграма для автомату станів клапану
- сигналізування тривог з використанням окремих дискретних сигналів:
- не відкрився, якщо клапан знаходиться в проміжному стані “ВІКДРИВАЄТЬСЯ” більше, ніж задано часом уставки
- не закрився, якщо клапан знаходиться в проміжному стані “ЗАКРИВАЄТЬСЯ” більше, ніж задано часом уставки
- загальна помилка датчика або довільний зсув:
- коли обидва датчика спрацьовують
- коли в кінцевому стані без зміни команди спрацьовують або відключаються датчики положення
3.2. Створення інтерфейсу функціонального блоку
- У проєкті
MyLibуGlobalстворіть новий POU типу функціонального блоку (рис.7)
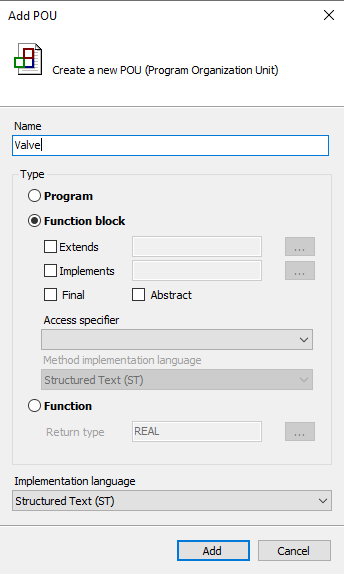
рис.7. Створення нового типу функціонального блоку
-
Використовуючи угорську нотацію змінних у області оголошення означте параметри, що відповідають входам виходам
- для клапану означте наступні булеві входи:
CMD- подача команди в автоматичному режиміAUTO- ручний (0), або автоматичний (1) режимMCMD- подача команди в ручному режиміGSOPN- датчик кінцевого положення ВІДКРИТОGSCLS- датчик кінцевого положення ЗАКРИТО
- наступний вхід типу INT
tTmSp- параметр, який вказує на максимальний час відкриття (в секундах)
- наступні булеві виходи
OUT- вихід на виконавчий механізмALMOPN- вихід сигналу тривоги “НЕ ВІДКРИВСЯ”ALMCLS- вихід сигналу тривоги “НЕ ЗАКРИВСЯ”ALMSENS- вихід сигналу тривоги “Помилка датчика або довільний зсув”
Це може мати наступний вигляд:
VAR_INPUT
bCmd: BOOL; //подача команди в автоматичному режимі
bAuto: BOOL; //ручний (0), або автоматичний (1) режим
bMCmd: BOOL: //подача команди в ручному режимі
bGSOpn: BOOL; //датчик кінцевого положення ВІДКРИТО
bGSCls: BOOL: //датчик кінцевого положення ЗАКРИТО
END_VAR
VAR_OUTPUT
END_VAR
VAR
bOut: BOOL; //вихід на виконавчий механізм
bAlmOPN: BOOL; //вихід сигналу тривоги "НЕ ВІДКРИВСЯ"
bAlmCls: BOOL; //вихід сигналу тривоги "НЕ ЗАКРИВСЯ"
bAlmSens: BOOL; //вихід сигналу тривоги "Помилка датчика або довільний зсув"
END_VAR
3.3. Аналіз рішення для іншого ПЛК
Даний функціональний блок реалізований для ПЛК M221 в середовищі Machine Expert Basic на мові LD. Необхідно проаналізувати роботу програми та реалізувати її функціонал в Machine Expert або CODESYS.
-
Проаналізуйте код, наведений нижче на рисунках. Зверніть увагу, що крім описаних вище вхідних та вихідних змінних використовуються наступні параметри:
-
%TM-параметр, який вказує час плинного стану (в секундах) -
%STA- параметр, який вказує плинний стан клапану: 0 - ініціалізація, 1 - відкритий, 2 - закритий, 12 - відкривається, 21 - закривається -
%BITS- внутрішня змінна, для розрахунку та збереження бітових результатів
-

рис.8. Керування виходом OUT у залежності від режиму.
Вихід OUT керується входом CMD в режимі AUTO і MCMD у ручному режимі. Зрештою такий ланцюжок можна прокоментувати так:
%OUT := %CMDпри%AUTO=1%OUT := %MCMDпри%AUTO=0
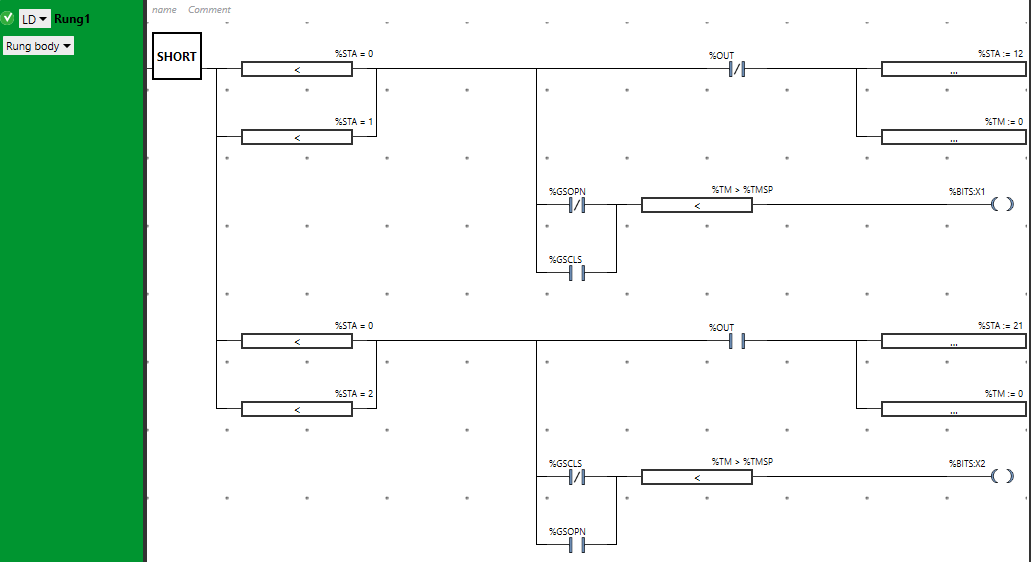
рис.9. Фрагмент програми для реалізації станів 0, 1 і 2
У цьому фрагменті реалізована поведінка в станах 0, 1 та 2:
- якщо у стані відкритий (1) або ініціалізації (0) відсутній вихід
OUT, значення часу (%TM) стану обнуляється і стан переходить в значення 12 - закривається;
значення 12 і 21 взято для зручності читання, і читається як перехід з 1 в 2, та перехід з 2 в 1 відповідно;
- якщо у стані відкритий (1) вмикається кінцевик ЗАКРИТО або відключається кінцевик ВІДКРИТО, то це очевидно помилка датчика; при цьому перевіряється, що стан тримається протягом максимального часу переходу між станами
зверніть увагу, що як тільки у відкритому стані вікдлючиться вихід - спочатку обнулиться час кроку, а потім вже відбудеться перевірка датчиків, тому в цій ситуації помилка датчика не відловиться
зверніть увагу, що замість булевих змінних можна використовувати біти слів, так запис
%BITS:X1вказує на використання 1-го біту в слові%BITS
Аналогічно реалізовані переходи та перевірка для закритого стану.
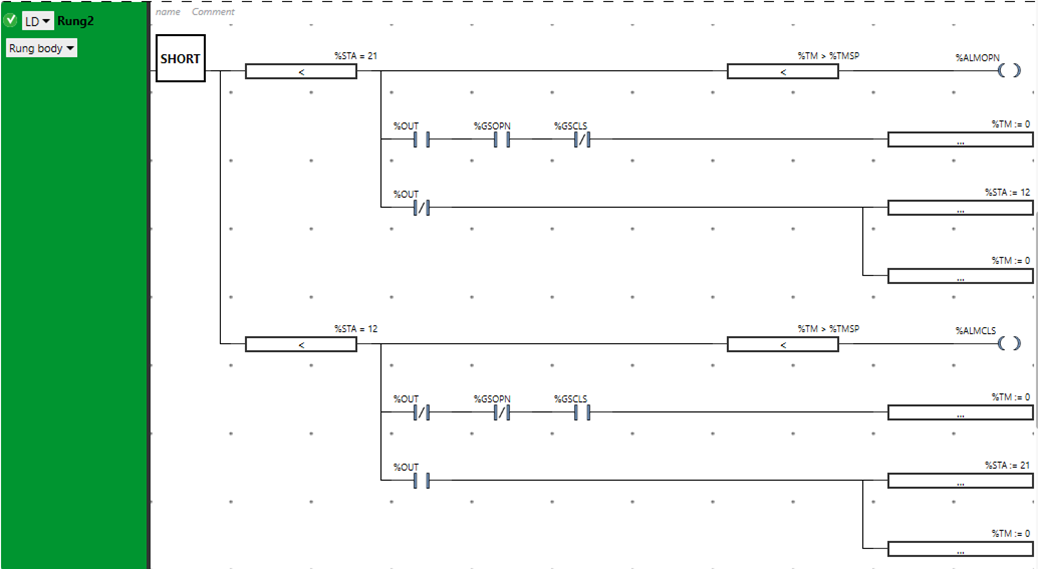
рис.10. Реалізація перехідного режиму.
У перехідних станах (21 і 12) перевіряється час стану (рис.10). Якщо цей час %TM більше заданого максимального %TMSP спрацьовує відповідний вихід тривоги. Перехідний стан завершується при спрацюванні відповідних датчиків, при цьому обнуляється час стану, саме присвоєння новому стану йде в наступному ланцюгу (див. рис.11). Якщо у перехідному стані, команда змінюється, то стан переходить в інший перехідний (наприклад з 21-го в 12-й при відключенні OUT).
Наступний фрагмент коду реалізує перехід в кінцеві стани при відповідних умовах, а також спрацювання виходу тривоги помилки датчика або довільного зсуву.
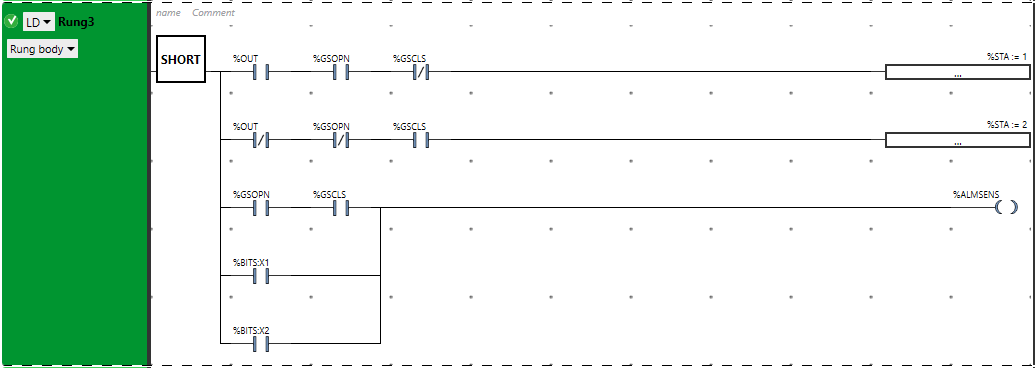
рис.11. Реалізація переходу в кінцеві стани та контроль помилок.
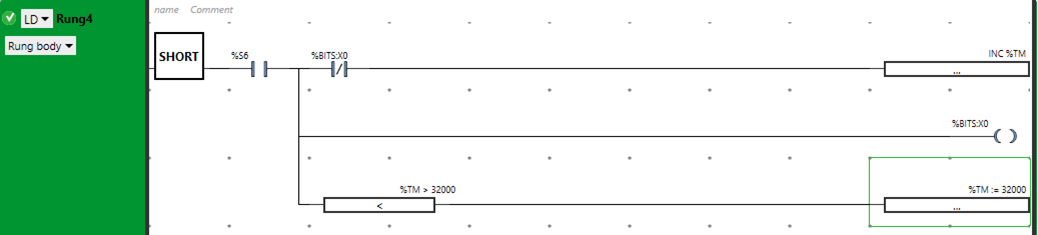
рис.12. Реалізація часу кроку.
Час кроку реалізується через змінну %TM, яка збільшується з кожною секундою. Для цього використаний бітовий меандр %S6 , який протягом 0.5 секунд тримає логічну одиницю, і стільки ж логічний нуль. У М221 не можна ловити фронти на системних бітах, тому для відлову переходів з 0 в 1 треба зберігати попереднє значення %S6 в 0-му біті внутрішнього слова %BITS.
У M241 є кілька варіантів сформувати меандри. Один із них - скористатися функціональним блоком типу BLINK. Нижче наведений приклад використання функціонального блоку з іменем fbBlink.
fbBlink(ENABLE:= true, TIMELOW:= t#0.5s , TIMEHIGH:=t#0.5s, out=> bA);
Важливо зробити обмеження збільшення часу %TM, так як при досягненні верхньої межи додатного значення (32767), змінна перейди у від’ємне значення. Тут плинне значення використовується більше для контролю перехідних станів, тому обмеження в 8 з чимось годин (32000/60/60) для цих задач цілком достатньо. При необхідності більшого часу, необхідно реалізовувати додаткові лічильники, або використовувати змінну типу DWORD.
3.4. Реалізація функціонального блоку
- Використовуючи наведений вище код, реалізуйте функціональний блок для Machine Epert або CODESYS на будь якій мові програмування з досутпних. Зверніть увагу, що прийдеться додавати нові змінні до області оголошення змінних функціонального блоку.
3.5. Створення та перевірки програми користувача з функціональними блоками
- У апаратній конфігурації проєкту означте дискретні входи та виходи, які мають контролювати та керувати циліндром а також задавати режим.
- У основній задачі створіть POU типу program на будь якій мові програмування із доступних.
- Складіть таблицю перевірки програми з функціональним блоком, при цьому врахуйте:
- весь набір можливих вихідних станів
- режими роботи
- поведінку при перезапуску застосунку ПЛК та рестарту ПЛК
-
Перевірте роботу функціонального блоку на емуляторі ПЛК.
- Зробіть копії екранів та таблиці для звітності. Збережіть їх в файлі звіту на Google диску.
3.6. Експортування функціонального блоку
- Використовуючи контекстний пункт меню
PLCOopenXMLExportзробіть експортування функціонального блоку в окремий файл -
Використовуючи браузер, редактор XML або текстовий редактор подивіться зміст експортованого файлу
- Збережіть та закрийте проєкт
MyLib
4. Модифікація програми користувача
4.1. Постановка завдання
- Проаналізуйте оновлені вимоги до початкового задачі, що наведені нижче.
Задача, наведена на рис.1 має змінений алгоритм роботи.
По-перше, добавляється датчик та змінюється керування соленоїдом:
- необхідно контролювати рівень в бункері ультразвуковим датчиком, що має вихід 4-20 мА, та вимірює значення в діапазоні 0.0-5.0 м;
- замість соленоїда вставляється заслінка, що керуюється пневмоциліндром, має два датчики кінцевого положення, та передбачає можливість ручного керування і формування тривог.
Машина для заповнення коробок повинна функціонувати в таких станах:
Idle- коли не відбувається процесу наповнення коробокStarting- коли машина запускаєтьсяRuning- коли відбувається фасуванняCompleting- коли машина зупиняєтьсяComplete- коли машина зупинилася
рис.1. До постановки задачі (Джерело: Petruzella F. D. Programmable Logic Controllers: 2025 Release ISE. McGraw Hill, 2025.)
Діаграма для автомату станів показана на рис.13.
stateDiagram-v2
[*] --> Idle
Idle --> Starting : Start
Starting --> Runing : Запуск завершено
Starting --> Completing : Stop
Runing --> Completing : Stop або умова завершення
Completing --> Complete : Зупинка завершена
Complete --> Idle : Stop
рис.13. Діаграма станів для оновленої задачі
Кожен стан машини сигналізується лампами, залежність показана в таблиці
Таблиця 4. Стан індикаторів в залежності від стану машини (FLASH - миготіння 0.5 секунд)
| Стан | Run | Standby |
|---|---|---|
Idle |
OFF | ON |
Starting |
FLASH | OFF |
Runing |
ON | OFF |
Completing |
ON | FLASH |
Complete |
OFF | FLASH |
При включенні живлення машина переходить в стан Idle. У цьому стані усі виходи на виконавчі механізми вимкнені. Машина не реагує на жодні кнопки крім Start. Після натискання Start машина переходить в стан Starting.
У стані Starting клапан закривається (якщо він відкритий), включається двигун. Умови завершення стану:
- пройшло не менше 5 секунд після початку стану AND клапан закритий AND бункер наповнений не менш ніж на 4 м -> перехід до
Running - натиснута кнопка
Stop- перехід до стануCompleting
У стані Runing треба автоматично заповнювати коробки, які рухаються по конвеєру. Послідовність роботи процесу безперервного наповнення така:
- Зупинити конвеєр, коли правий край коробки вперше зафіксовано фотодатчиком (
Photo switch). - Коли коробка в позиції і конвеєр зупинений, відкрити заслінку і дозволити наповнення коробки. Наповнення має припинитися, коли датчик рівня (
Level switch) стане істинним. Після цього закрити заслінку, дочекатися коли вона закриється і включити конвеєр. - Увімкнути індикатор повної коробки (
Full), коли коробка заповнена. Індикатор має залишатися увімкненим, доки коробка не буде переміщена за межі фотодатчика.
Умови завершення стану Runing і перехід в стан Completing : рівень в бункері менше 0.1 м і коробка на конвеєрі заповнена АБО натиснута кнопка Stop
У стані Completing закривається заслінка набору коробки, після чого включається таймер на 5 с протягом якого працює конвеєр. Після цього машина переходить в стан Complete.
У стані Complete усі виходи на виконавчі механізми відключені. Перехід в Idle відбувається після натискання кнопки Stop
4.2. Декомпозиція задачі
На відміну від початкової задачі, вимоги до даної задачі передбачають наявність окремих станів, в залежності від яких машина веде себе по різному. Для вирішення таких задач, комбінаторна логіка залежності виходів від входів перетворюється в громіздку задачу. Натомість варто використовувати приниципи автоматів станів, які розглянуто як в теоретичній так і практичній частині тем Рольова модель обладнання а також Стано-орієнтовний підхід в програмуванні. Один з варіантів вирішення цієї задачі є розбиття її на дві частини:
1) означення логіки і відповідно програми керування автоматом станів всієї машини 2) означення логіки роботи програми на кожному із станів
Перша частина задачі вирішується через створення спеціальної змінної стану (кроку), як це описано в пункті “Означення стану через змінну кроку” в Стано-орієнтовний підхід в програмуванні: теоретична частина. Програма керування повинна змінювати значення цієї змінної в залежності від плинного значення та від спрацювання умов переходу. У свою чергу значення цієї змінної буде додатковою умовою для керування виходами. Так, наприклад, значення виходів на кнопки Run та Standby залежить виключно від значення змінної стану та можливо таймеру для формування меандру. Значення інших виходів буде залежати від логіки виконання програми зо реалізує відповідний стан.
Друга частина задачі при наявності умови стану реалізується значно простіше. По-перше, в кожному стані необхідно перевіряти тільки частину входів та в залежності від них керувати виходами. По-друге, деякі виходи в цьому стані не змінюються протягом цього стану. Варто зауважити що при реалізації логіки керування дискретними виходами в LD варто користуватися не звичайними котушками, а котушками з фіксаціями типу S та R.
-
Визначте необхідні змінні та модифікуйте перелік змінних та вимоги до них, які були надані в таблиці 1. Добавте також до таблиці змінну стану(кроку) та змінну часу стану.
-
Сформуйте таблицю 2 для автомату станів та кожного зі станів і заповніть у нових аркушах Google Sheet. Зверніть увагу, що в кожному стані тільки частина виходів залежать від частини входів (див. пояснення вище).
4.3. Реалізація задачі та перевірка
- Відкрийте проєкт з назвою
POU_labs - Імпортуйте у Global функцію
SCALEта функціональний блокValve. - Видаліть виклик Action
Simpleverз POUHopper. - Створіть новий Action
StateMachineв якому реалізуйте логіку керування автоматом станів та добавте її до виклику в POUHopper. - Для кожного зі станів створіть Action з логікою обробки в стані.
-
Пропишіть в POU
Hopperвиклик потрібних Action тільки коли відповідний стан активний. -
Заванатажте проєкт в емулятор ПЛК та перевірте роботу програми.
- Збережіть проєкт
POU_labsта розмістіть його на Google Drive в папці лабораторної роботи - Відправте посилання викладачу на файл Google Drive
5. Підготовка та відправлення звіту
- На Google диску у папці в папці
LabPou, що знаходиться в папціMyLabs, вже мають бути створені усі необхідні матеріали, які заповнювалися по ходу виконання роботи.
Питання до захисту
- Коли виникає необхідність у створенні власних функціональних елементів?
- Розкажіть про інтерфейс та область видимості.
- Що таке функції?
- Що таке вхідні та вихідні параметри функціональних елементів?
- Поясніть поняття “формальні параметри” та “фактичні параметри”.
- Що таке функції користувача? Навіщо в лабораторній роботі створювалася функція користувача?
- Що таке локальна змінна функції?
- Чим функціональний блок принципово відрізняється від функції?
- Розкажіть про призначення функціонального блоку, який реалізований в даній лабораторній роботі.
- Поясніть програмну реалізацію функціонального блоку, який реалізований в даній лабораторній роботі.
Джерела
- Modicon M241 Logic Controller User Guide, 04/2021, Schneider Electric
- EcoStruxure Machine Expert Software User Guide, 09/2021, Schneider Electric
- Petruzella F. D. Programmable Logic Controllers: 2025 Release ISE. McGraw Hill, 2025.
Автори
Практичне заняття розробив Олександр Пупена.
Feedback
Якщо Ви хочете залишити коментар у Вас є наступні варіанти:
Про проект і можливість допомогти проекту написано тут