PID регулятор з PID_Compact V2: швидкий старт
Даний посібник дає стиснуту інформацію щодо структури, запуску і перевірки роботи регулятору PID_Compact V2 з вбудованої бібліотеки регулювання S7 1200/1500.
Структура контуру регулювання
Для перевірки роботи регулятору треба створити та налаштувати контур регулювання, який складається з наступних елементів (рис.1):
- Функціональний блок
PID_Compactв якості регулятору (в англ. регулятор це Controller) - Функціональний блок
PT1- змодельовані технологічні процеси (імітаційна модель) в якості керованої система (Controoled system) - за бажанням операторська панель (HMI) або SCADA
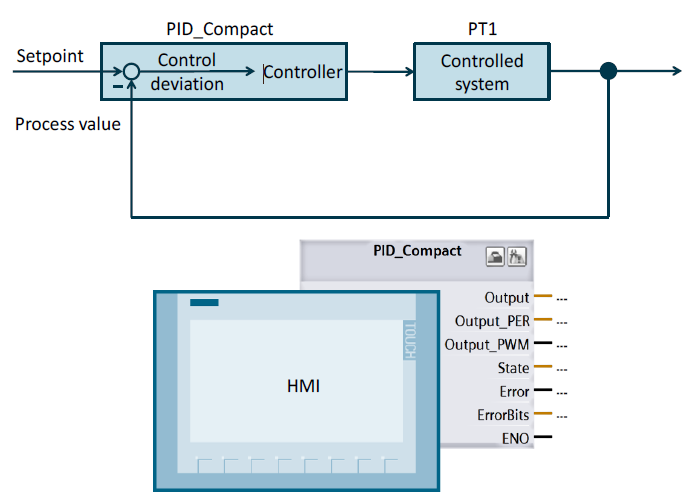
рис.1. Структура контуру регулювання
Підготовка імітаційного об’єкта
Дослідження роботи регулятору варто робити разом з об’єктом. Оскільки передбачається, що дослідження проводиться на імітаторі ПЛК, то об’єкт регулювання має також імітуватися. Найбільш простим способом імітувати об’єкт - використати аперіодичну ланку 1-го порядку. У цьому прикладі використаємо для цього вбудований функціональний блок Filter_PT1
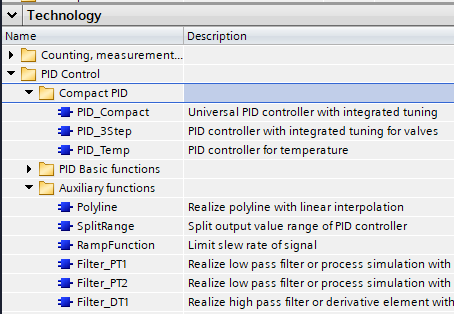
рис.2. Filter_PT1 у бібліотеці TIA Portal
Filter_PT1 є пропорційним елементом передачі із затримкою першого порядку, який можна використовувати для різних цілей, зокрема:
- для фільтрації сигналу з метою послаблення високочастотних шумів;
- згладжування крокових змін сигналу, наприклад зміни уставки або вихідного значення регулятора;
- моделювання технологічної змінної, що якраз використаємо нижче.
Для Filter_PT1 можна вказати наступні параметри:
- Пропорційне посилення вхідного сигналу
Gain, який є множником, тому при рівності1.0сигнал на виході після завершення перехідного процесу буде дорівнювати сигналу на вході, коли<1.0- буде послаблюватися,>1- підсилюватися - Постійна часу затримки
Lag- задає
На наступному рисунку показано ступінчату характеристику: реакцію виходу ($Output(t)$) блоку Filter_PT1 на ступінчату зміну сигналу на вході ($\Delta Input$).
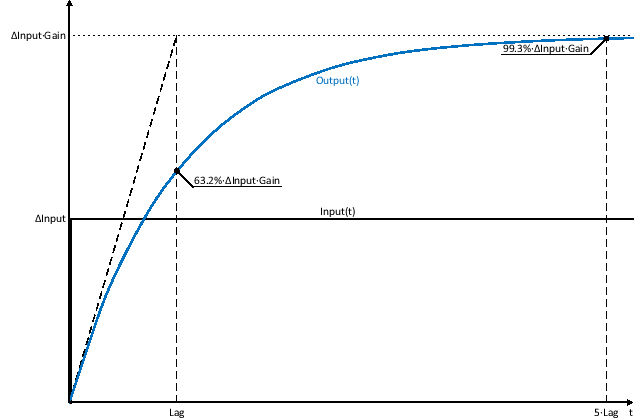
рис.3. Реакція виходу блоку Filter_PT1 на ступінчату зміну сигналу.
Наступна формула показує передаточну функцію аналогового елемента що моделюється аперіодичною ланкою першого порядку, де s дорівнює оператору Лапласа:

Взагалі є певні відмінності між ланкою першого порядку в неперервному часі та дискретним Filter_PT1, який виконується в програмі ПЛК. Але чим менший і постійніший час циклу, тим менша помилка невідповідності між властивостями цих елементів. Для нашого випадку це не принципово, а формулу вище наведено для повноти картини.
Блок Filter_PT1 має викликатися періодично, тому необхідно створити функціональний блок та викликати його в періодичному OB.
- Cтворіть функціональний блок
aiIsmlекземпляр якогоaiIsml_DBвикличте вOB30.
"aiIsml_DB"();
Надалі будемо вважати що імітується перепад тиску на вентиляторі, оберти якого будемо змінювати.
- У інтерфейсі ФБ
aiIsmlстворіть наступні статичні змінні (рис.4).
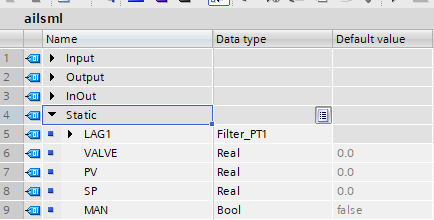
рис.4. Інтерфейс функціонального блоку aiIsml_DB
Інтерфейс aiIsml включає: LAG1 - це екземпляр Filter_PT1, #VALVE - змінна що йде на виконавчий механізм, #PV - імітована змінна, інші змінні будуть використовуватися пізніше. У програмі"FirstScan" - змінна яка встановлюється на один цикл при старті ПЛК (%M1.0).
- У ФБ
aiIsmlстворіть програму, яка наведена нижче.
#LAG1.Gain := 2.5;
#LAG1.Lag := 5;
#LAG1(Input:= #VALVE,
Reset := "FirstScan",
Output => #PV);
Налагодження цієї частини програми передбачає зміну вхідної змінної об’єкту та перегляду зміни вихідної змінної. Якщо імітується робота операторської панелі, то значення змінної можна вивести на тренд.
- Завантажте програму в імітатор ПЛК. Створіть Watch таблицю, внесіть туди
PVтаValve(рис.5). Змініть значенняValveна 100%. Після часу ` #LAG1.Lagвихідне значення буде#PV:=#Valve*#LAG1.Gain`.

рис.5. Таблиця Watch
Створення та базові налаштування PID_Compact
Регулятор PID_Compact в TIA Portal створюється та конфігурується у розділі Technology objects. Щоб перевірити його роботу в імітаторі ПЛК, треба конфігурувати проект з S7 1500, так як імітатор S7 1200 не підтримує роботу даних функціональних блоків (мені дивна така поведінка, але це факт).
- Створіть технологічний блок типу PID_Compact.
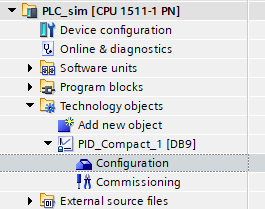
рис.6. Створення екземпляру PID_Compact
Як видно з рис.6, даний функціональний блок має окремі посилання на налаштування (Configuration) і введення в дію та налагодження (Commissioning). Конфігурування доступне також через вікно інспектора редактора програмування.
Виклик екземпляра PID_Compact повинен відбуватися тільки в OB циклічного переривання. У нашому випадку для цього створено OB30 де вже викликається функціональний блок імітатора об’єкта.
- Перетягніть технологічний об’єкт в OB30, перейдіть в налаштування через вбудований інспектор (курсор на імені -> вкладка Configuration, рис.7).
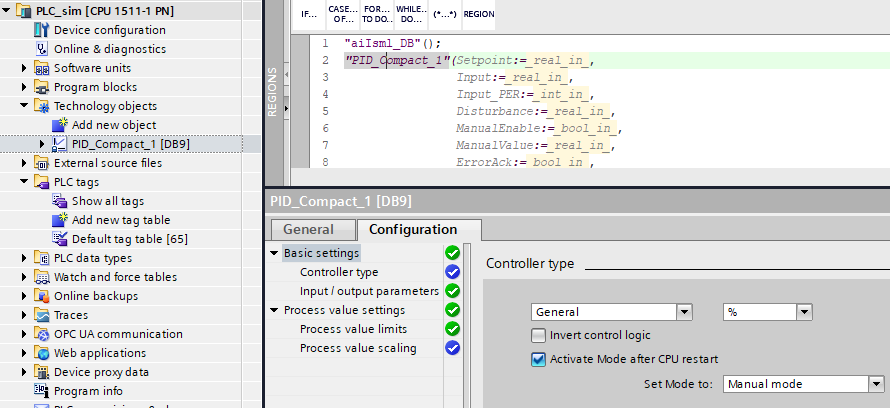
рис.7. Виклик екземпляра PID_Compact
У вікні конфігурації (через налаштування або через вікно інспектора) налаштовуються параметри регулятору, зокрема: фізична величина, логіка керування, поведінка при запуску після скидання, уставку, значення процесу та вихідне значення. Задане значення (Setpoint), значення процесу (Input) та вихідне значення (Output) можна налаштувати тільки у вікні інспектора редактора програмування. Для цього можна вибрати джерело для кожного значення:
- Instance DB (екземплярний блок даних): використовується значення, збережене в екземплярі DB, яке оновлюється програмою користувача або через HMI.
- Instruction (Інструкція): використовується значення, пов’язане з інструкцією, яке записується в екземплярний DB кожного разу, коли викликається інструкція.
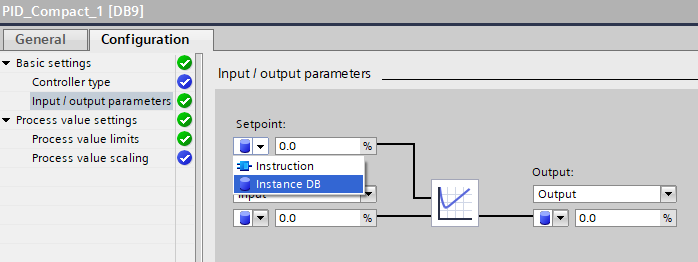
рис.8. Вибір джерела
- Вкажіть входи як інструкції, вибравши режим масштабованих значень (не
_PER). Поступовим заповненням вікна інспектора Ви отримаєте наступний код:
"aiIsml_DB"();
"PID_Compact_1"(Setpoint:="aiIsml_DB".SP, Input:="aiIsml_DB".PV, Output=>"aiIsml_DB".VALVE);
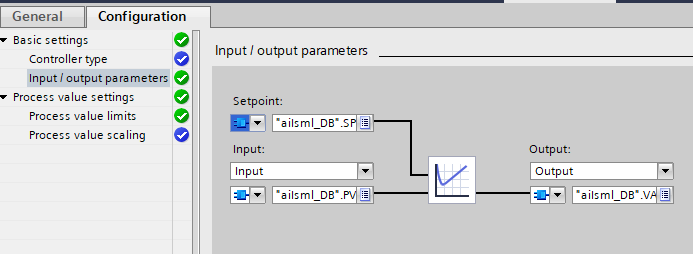
рис.9. Налаштування для прикладу
- У групі властивостей
Controoler typeзмініть тип наPressure. При старті CPU регулятор запуститься в ручному режимі (див. описи режимів нижче). Уprocess value limitsвиставте межі вимірювальної величини для регулювання, наприклад від20 Paдо220 Pa. Також введіть обмеження на вихід регулятораOutput value high limitрівним90%.
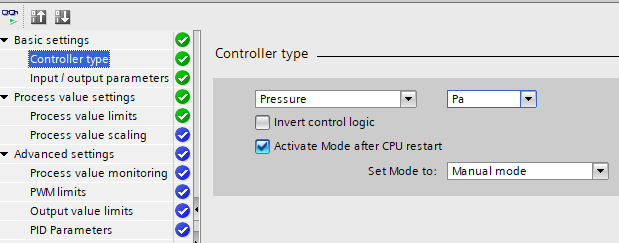
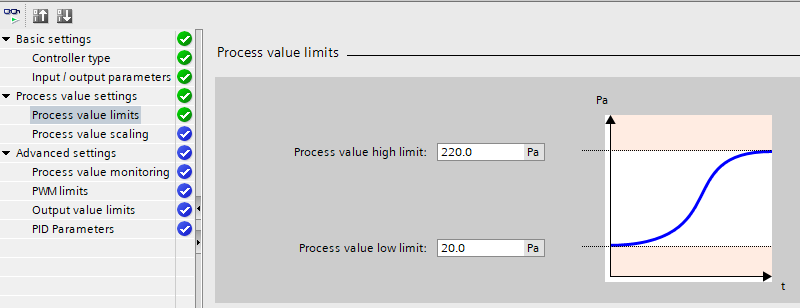
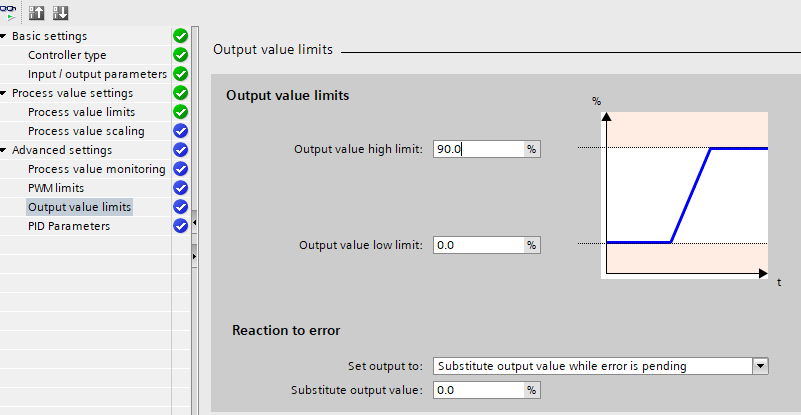
рис.10. Інші налаштування для прикладу
-
Налаштування
Reaction on Errorзалиште без змін, про них буде написано в розділі “Режими роботи”. -
Відкрийте вікно конфігурації, подивіться додаткові налаштування. Перейдіть на закладку з усіма параметрами функціонального блоку, познайомтеся зі змістом вкладки.

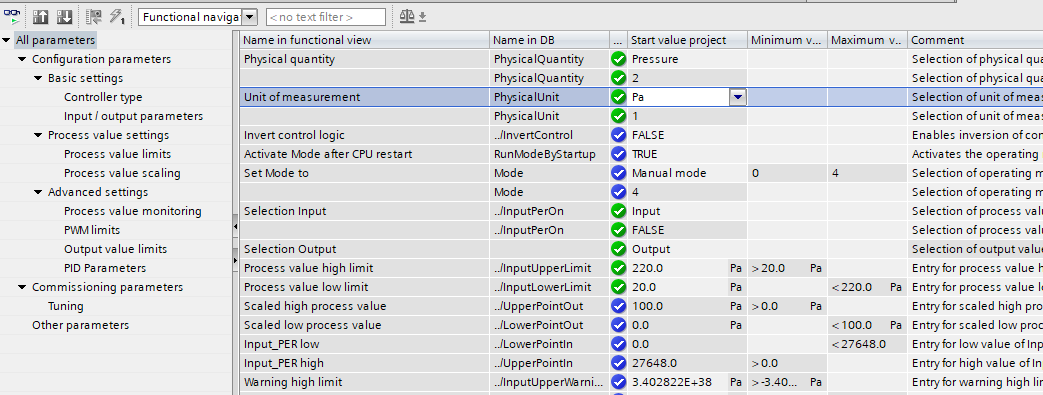
рис.11. Перегляд параметрів
- Ознайомтеся зі змістом екземплярного DB, через пункт
Open DB Editorконтекстного меню PID Cpmpact.
Перше введення в дію PID_Compact
- Після створення базових налаштувань компілюйте та завантажте проект в імітатор ПЛК.
Після цього можна налаштувати регулятор через вікно введення в дію Commissioning, яке викликається через відповідний пункт технологічного об’єкту (рис.12).
- Відкрийте вікно введення в дію. У цьому вікні включіть перегляд
Monitor Allта включіть самописець з дискретністю 1 с.
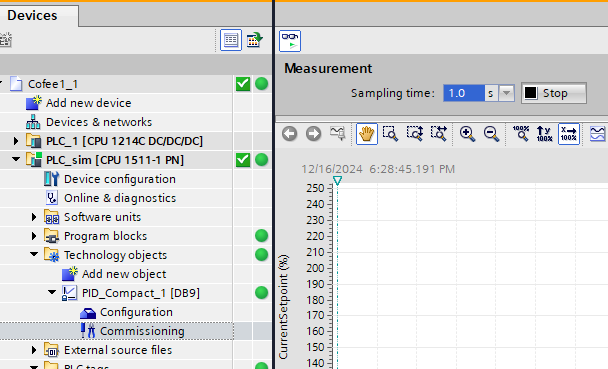
рис.12. Запуск через вікно введення в дію
Для початку перевіримо роботу регулятора в ручному режимі (саме в такому він запустився).
- Виставте значення виходу на
80%і натиснітьSends manual mode to the CPU.
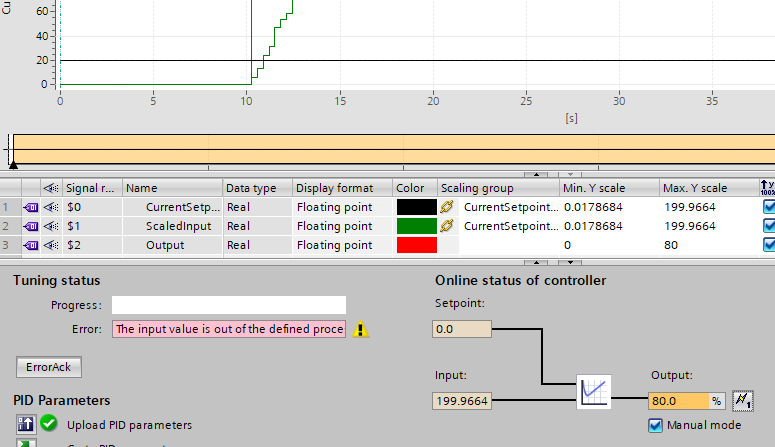
рис.13. Зміна значення виходу в ручному режимі
- Перегляньте на самописці криву розгону (рис.14). Використовуючи кнопки керування самописцем, відмасштабуйте графік.
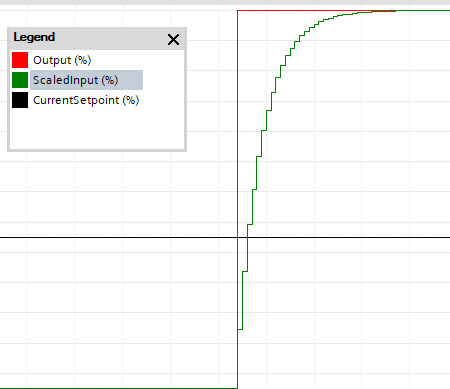
рис.14. Крива розгону отримана в ручному режимі.
-
Змініть значення на
0%і дочекйтеся усталеного режиму. НатиснувшиStop, та зновуRunможна перезапустити самописець. -
Для запуску регулятора необхідно зніміть опцію
Manual Modeі запустіть регулятор кнопкоюStrt PID_Compact(рис.15). Змініть завдання SP уWatch Tableрівним125.
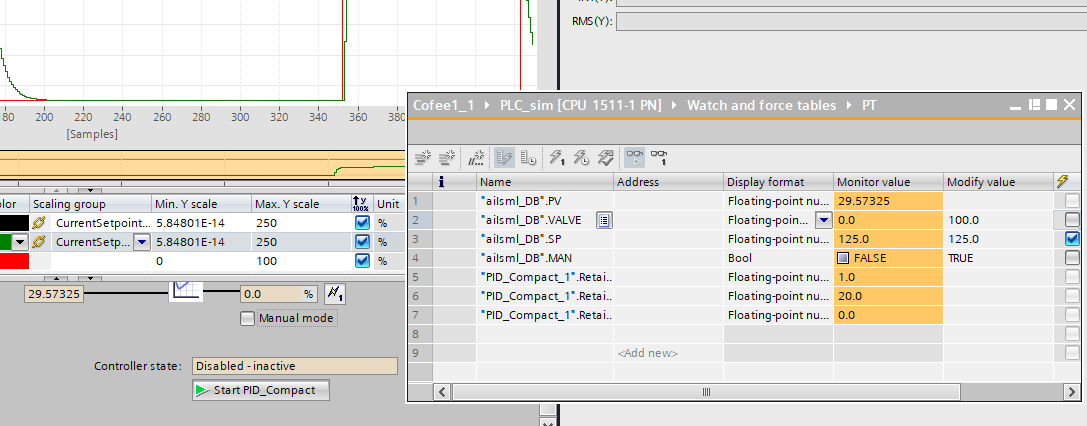
рис.15. Запуск автоматичного режиму.
- Дочекайтеся, коли регулятор досягне свого значення, це буде десь через хвилину.
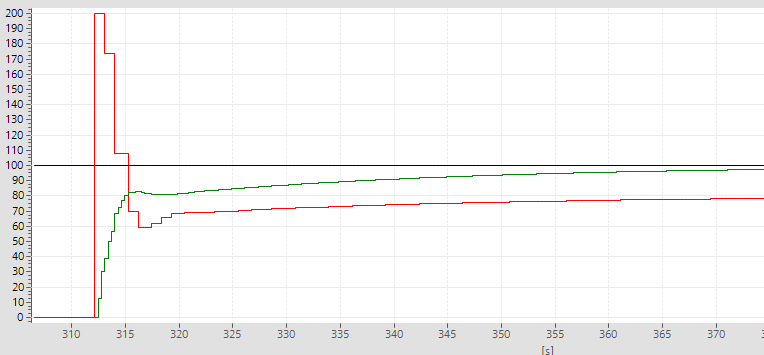
рис.16. Перехідний процес контуру регулювання з параметрами регулятора за замовченням
Параметри ПІД-регулятора
Параметри PID_Compact відображаються у вікні конфігурації «PID Parameters».
- Перегляньте значення параметрів регулятору, які наразі є за замовченням (рис.17).
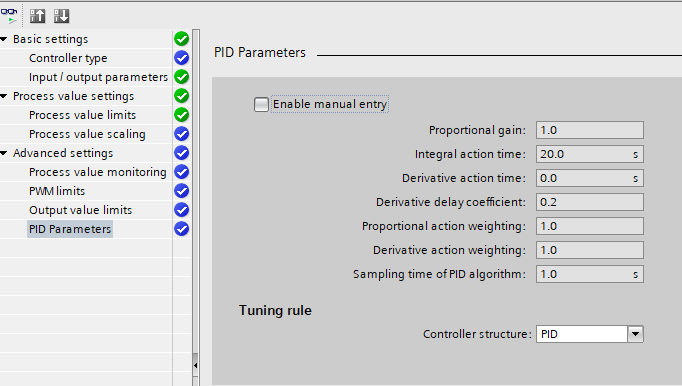
рис.17. Вікно параметрів PID зі значеннями за замовчуванням
Передбачається що ці параметри будуть адаптовані до керованої системи під час авто-налаштування регулятора. Але їх можна вводити вручну за необхідності. Для PID_Compact V2 параметри знаходяться у структурі Retain.CtrlParams, змінювати їх можна в онлайн, але бажано в режимі “Inactive”, щоб запобігти помилок розрахунку регулятора. Якщо необхідно змінити параметри PID в онлайн в режимі в “Automatic mode” або “Manual mode” , необхідно це робити наступним чином: змінити параметри PID у структурі CtrlParamsBackUp і застосувати ці зміни за допомогою LoadBackUp = TRUE до структури Retain.CtrlParams. Онлайн-зміни параметрів PID в “Automatic mode” можуть призвести до стрибків вихідного значення.
Алгоритм PID працює за таким рівнянням:

| величина | тип | призначення |
|---|---|---|
| y | real | Вихідне значення алгоритму ПІД (Output) |
| x | real | Плинне (дійсне) значення процесу (Input) |
| w | real | Задане значення (Setpoint) |
| Kp | real | Коефіцієнт пропорційності. PID_Compact не працює з негативними значеннями Kp, натомість напрям регулювання змінюється через Invert Control Logic |
| TI | real | Стала часу інтегрування (с). Якщо TI = 0.0, то складова відключається, а інтегральна складова обнуляється. |
| TD | real | Стала часу диференціювання (с). Якщо TD = 0.0, то складова відключається. |
| b | real | Вага уставки пропорційної складової. Приймає значення від 0.0 до 1.0 і призначена дія послаблення ефекту зміни заданого значення. При 1.0 - звичайний ефект, при 0.0 - пропорційна складова не реагує на зміну заданого значення (але інші складові реагують). Пропорційна складова завжди реагує на зміну плинного значення процесу. |
| a | real | Коефіцієнт запізнення похідної (derivative delay T1 = a × TD). При 0.0 - диференційна складова діє лише протягом одного циклу, і тому майже не ефективна. При 0.5 корисне на практиці для керованих систем з однією домінуючою постійною часу. При > 1.0 зі збільшенням коефіцієнту довше затримує ефект диференційної складової. |
| c | real | Вага уставки диференційної складової. Приймає значення від 0.0 до 1.0 і призначена дія послаблення ефекту зміни заданого значення. При 1.0 - звичайний ефект, при 0.0 - диференційна складова не реагує на зміну заданого значення (але інші складові реагують). Диференційна складова завжди реагує на зміну плинного значення процесу. |
| s | real | Оператор Лапласа |
Схема роботи алгоритму наведена на рис.18.
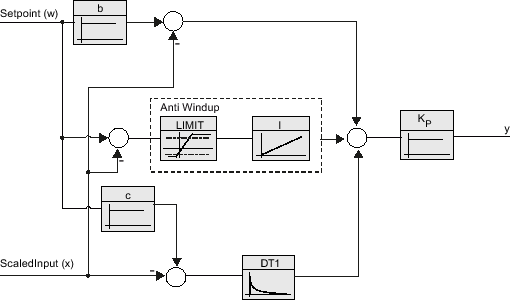
рис.18. Схема PID Compact
Час дискретизації алгоритму ПІД (Sampling time of PID algorithm sampling time) - вказує на період з яким розраховується вихідне значення. Керованій системі потрібен певний час, щоб відреагувати на зміни вихідного значення, тому не рекомендується обчислювати вихідне значення в кожному циклі виклику регулятору (наприклад в OB30). Він розраховується під час налаштування та округлюється до кратного значення часу циклу. Усі інші частини PID_Compact обробляються при кожному виклику.
При використанні Output_PWM час дискретизації алгоритму PID використовується як період часу широтно-імпульсної модуляції. Точність вихідного сигналу визначається відношенням часу дискретизації алгоритму ПІД до часу циклу ОВ. Тому рекомендовано, щоб тривалість циклу в цьому випадку становила максимум одну десяту часу вибірки алгоритму ПІД.
Усі параметри PID зберігаються при вимкненому живленні (retentive). Якщо параметри PID змінюються вручну, необхідно повністю завантажити PID_Compact.
Режими роботи регулятору PID Compact
Окрім класичних ручного та автоматичного режиму PID Compact має ще кілька режимів (станів), які відображаються у вихідній змінній State. Перехід з режиму в режим можливий за переднім фронтом входу ModeActivate, а сам режим задається у параметрі in-out Mode. При старті ПЛК PID_Compact запускається в тому робочому режимі, який зберігається в параметрі Mode. Щоб залишити PID_Compact у неактивному режимі при старті, необхідно установити RunModeByStartup = FALSE. Розглянемо перелік режимів.
0 - Inactive (неактивний) . У цьому режимі роботи вихідне значення завжди дорівнює 0.0, незалежно від ПІД та без урахування Config.OutputUpperLimit і Config.OutputLowerLimit. Широтно-імпульсна модуляція також вимкнена.
1 - Pretuning (попереднє налаштування). У цьому режимі шукаються наближені значення коефіцієнтів регулятора (див. нижче).
2 - Fine tuning (точне налаштування). У цьому режимі шукаються найкращі згідно алгоритму пошуку значення коефіцієнтів регулятора (див. нижче).
3 - Automatic mode (автоматичний). У цьому режимі PID_Compact коригує керовану систему відповідно до заданих параметрів і роботи ПІД. Регулятор переходить в автоматичний режим, якщо виконується одна з наступних вимог:
- Попереднє налаштування успішно завершено
- Точне налаштування успішно завершено
- In-out параметр
Modeзмінено на значення3, і по передньому фронту наModeActivate.
Перемикання з автоматичного режиму на ручний відбувається безперебійно тільки у випадку, якщо воно виконується на сторінці введення в експлуатацію. В автоматичному режимі враховується тег ActivateRecoverMode.
4 - Manual mode (ручний). У цьому режимі вихідне значення задається вручну через ManualValue. Рекомендується змінювати цей режим роботи лише за допомогою Mode та ModeActivate, але його можна активувати за допомогою ManualEnable = TRUE. Перемикання з ручного режиму на автоматичний здійснюється безударно. Ручний режим доступний навіть при роботі регулятора з помилкою.
5 - Substitute output value with error monitoring (заміна виходів з моніторингом помилки). Цей режим роботи активується автоматично, коли виникає помилка регулювання. У цьому режимі алгоритм керування вимкнено так само як і в неактивному. Але натомість на вихід буде подаватися значення-замінник, яке залежить від булевого параметра SetSubstituteOutput:
- якщо
SetSubstituteOutput = FALSE, то на виході буде останнє дійсне вихідне значення - якщо
SetSubstituteOutput = TRUE, то на виході буде значенняSubstituteOutput
Вручну цей режим активувати неможливо. Цей режим активується за наступних умов:
- Активний автоматичний режим (3)
- Параметр
ActivateRecoverMode = TRUE - Сталася одна або кілька помилок, у яких діє
ActivateRecoverMode.
Як тільки помилки зникають, PID_Compact повертається в автоматичний режим. Якщо перші дві умови не виконуються, але виникає помилка, то регулятор переходить в неактивний режим,
Автоматичне налаштування регулятору
PID_Compact передбачає можливість автоматичного налаштування параметрів регулятора. Знаходження найкращих параметрів ПІД регулятора проводиться в два етапи: попереднього та точного налаштування.
Попереднє налаштування
Попереднє налаштування (Pretuning) визначає реакцію процесу на стрибкоподібну зміну вихідного значення та шукає точку перегину. Параметри PID розраховуються з максимальної швидкості наростання та часу запізнення керованої системи. Варто зауважити, що чим стабільніше при цьому значення процесу, тим легше обчислити параметри ПІД і тим точнішим буде результат. Тому треба уникати або зменшувати вплив шумів на значенні процесу. Для запуску попереднього налаштування повинні бути задоволені наступні вимоги:
-
Вхід
ManualEnable = FALSE -
Вхід
Reset = FALSE -
PID_Compact знаходиться в одному з наступних режимів (значення
State): “Inactive” (0), “Manual mode” (4), або “Automatic mode” (3) -
Задане значення та значення процесу знаходяться в межах налаштованих меж (див. конфігурацію “Process value monitoring”).
-
Різниця між заданим значенням і значенням процесу перевищує 30% різниці між верхньою межею значення процесу та нижньою межею значення процесу.
|Setpoint - Input| > 0.3 * |Config.InputUpperLimit - Config.InputLowerLimit| -
Різниця між заданим значенням і значенням процесу становить > 50% заданого значення.
|Setpoint - Input| > 0.5 * |Setpoint|
Отже в нашій задачі для початку необхідно забезпечити умови виконання для запуску попереднього налаштування. Спочатку визначимо діапазон вимірювальної величини
|Config.InputUpperLimit - Config.InputLowerLimit| = 220 - 20 = 200 Pa
Якщо припустити що Setpoint = 125 Pa, то має забезпечуватися умова
|Setpoint - Input| > 0.3 * 200 => |125 Pa - Input| > 60 Pa => Input < 65 Pa
А також друга умова:
|125 Pa - Input| > 0.5 * 125 Pa => Input < 62.5 Pa
Отже необхідно забезпечити щоб плинне значення перед запуском попереднього налаштування було: Input < 62.5 Pa.
- Задайте в ручному режимі на вихід
20%. Після завершення перехідного процесуInput = 50.0. Протягом всього часу в поліTuning Status Errorбуде світитися помилка виходу значення за діапазон (рис.19). Після досягнення необхідного значення, кнопка підтвердженняErrorAckскине помилку, що вкаже на можливість запуску автоналаштування (Tuning has not been started yet.).
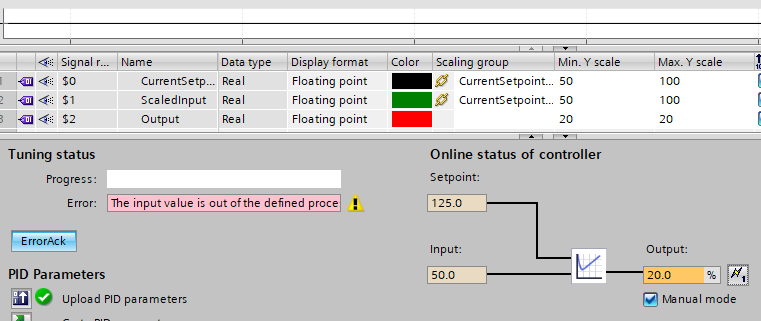
рис.19. Встановлення необхідного значення для запуску попереднього налаштування регулятору.
- Натисніть
Tuning modeдля запуску налаштування.

рис.20. Кнопка запуску налаштування
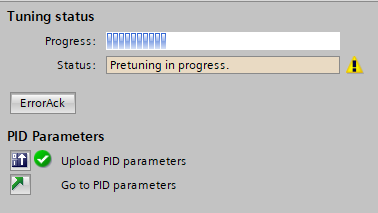
рис.21. Прогрес автоналаштування
- Дочекайтеся завершення автоналаштування, у полі статусу відображатиметься
System tuned, а регулятор перейде в автоматичний режим. Якщо попереднє налаштування не вдалось, перемикання режиму роботи залежить відActivateRecoverMode.
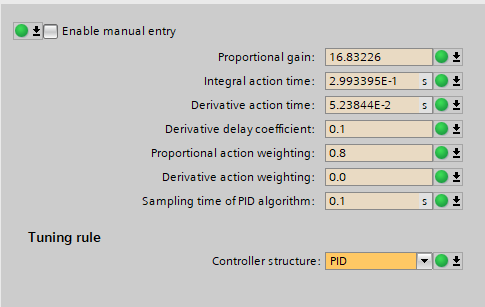
рис.22. Параметри регулятору після попереднього автоналаштування
Перед повторним обчисленням параметрів PID створюється резервна копія, і їх можна повторно активувати за допомогою LoadBackUp.
Точне налаштування
Точне налаштування створює постійне обмежене коливання значення процесу. Параметри ПІД перераховуються на основі амплітуди та частоти цього коливання. Параметри ПІД-регулювання від точного налаштування зазвичай мають кращі характеристики основного керування та збурень, ніж параметри ПІД-регулювання від попереднього налаштування. Ви отримуєте найкращі параметри ПІД, коли виконуєте спочатку попереднє а потім точне налаштування. PID_Compact автоматично намагається генерувати коливання, що перевищує шум значення процесу. Стабільність значення процесу лише мінімально впливає на точне налаштування.
Уставка закріплена в CurrentSetpoint. Налаштування скасовується, коли:
- Setpoint > CurrentSetpoint + CancelTuningLevel або
- Setpoint < CurrentSetpoint - CancelTuningLevel
Перед повторним обчисленням параметрів PID створюється резервна копія, і їх можна повторно активувати за допомогою LoadBackUp.
Запуск точного налаштування можна зробити з автоматичного режиму. Якщо він запускається з ручного або неактивного режиму регулятору, тоді буде спочатку проведене попереднє налаштування, після чого запуститься точне.
- У
Tuning Modeвиберіть точне налаштування, та натисніть кнопкуStart. По завершенню у полі статусу відобразитьсяSystem tuned.
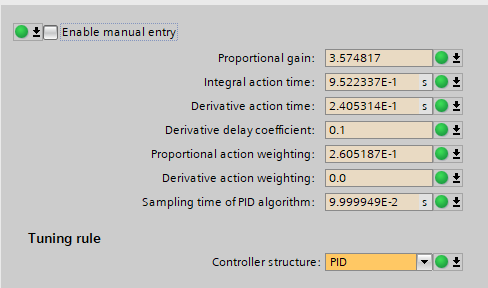
рис.23. Параметри регулятору після точного автоналаштування
- Для завантаження параметрів в проект, натисніть кнопку
Upload PID Parameters, після чого дійсні значення стануть значеннями за замовченнями. Далі зміни в проекті завантажте в ПЛК.
рис.24. Вивантаження налаштованих параметрів в проект
- Для перевірки роботи регулятору, змініть значення завдання до 60 Pa. Перехідний процес триватиме близько 10 секунд
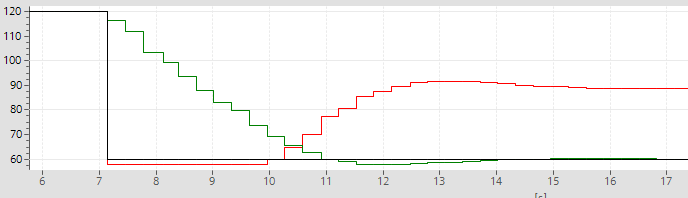
рис.25. Перехідний процес після точного налаштування регулятора.
Керування режимом руч/авт ззовні
- Для можливості керування регулятором зовнішніми засобами HMI, змініть програму до наступного вигляду:
"aiIsml_DB"();
"PID_Compact_1"(Setpoint:="aiIsml_DB".SP,
Input:="aiIsml_DB".PV,
ManualEnable:="aiIsml_DB".MAN, //ручний режим
ManualValue:="aiIsml_DB".VALVE, //ручне значення = вихід на ВМ
Output=>"aiIsml_DB".VALVE);
- Перевірте чи можна за допомогою змінних ручного завдання та переключення режимів впливати роботу регуляторів.
Автори
Теоретичне заняття розробив Олександр Пупена.
Feedback
Якщо Ви хочете залишити коментар у Вас є наступні варіанти:
Про проект і можливість допомогти проекту написано тут