Конфігурування PID регулятора в EcoStruxure Machine Expert Basic: практична частина
Мета: навчитися створювати програми користувача з ПІД-регуляторами.
Необхідне програмне забезпечення. EcoStruxure Machine Expert Basic
Порядок виконання роботи
1. Створення нового проекту
УВАГА! Дану частину роботи неможливо перевірити в симуляторі ПЛК, оскільки він не підтримує роботу PID-регулятора. Тому в даній частині виконується лише конфігурація без перевірки працездатності.
- Створіть новий проект в Machine Expert Basic. У якості процесорного модуля оберіть TM221CE24R.
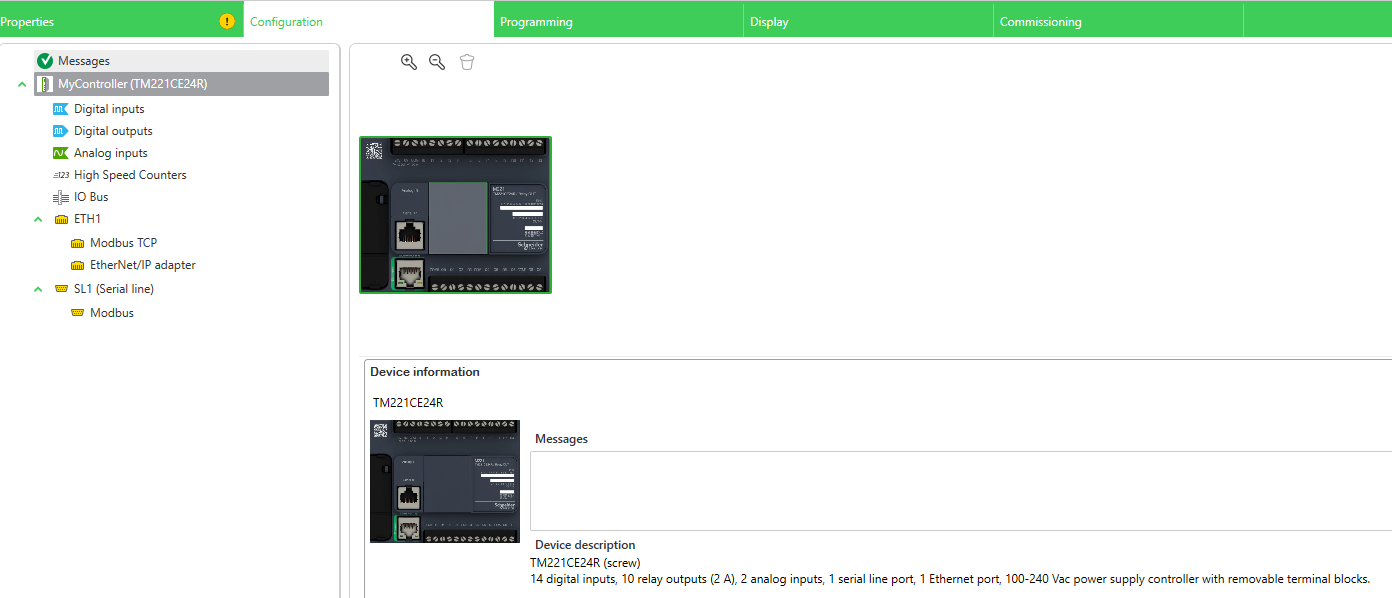
Рис. 9.1. Конфігурація ПЛК
2. Постановка завдання для прикладу
- Познайомтеся з постановкою задачі, яка наведена нижче
В змінній %MW10 зберігається значення з датчика рівня з вихідним уніфікованим сигналом 0-10V, діапазон в ПЛК 0-10000. В змінній %MW20 зберігається значення керування електричним приводом клапана з уніфікованим сигналом керування 0-10V, діапазон в ПЛК 0-10000, за допомогою якого необхідно підтримувати заданий рівень в ємності (рис.9.2)
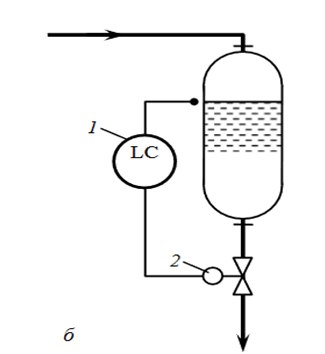
Рис. 9.2 Функціональна схема об’єкта керування
Для розв’язання поставленої задачі скористаємось одним з ПІД регуляторів ПЛК М221.
3. Налаштування типу PID регулятора
- Для виконання конфігурації PID регуляторів необхідно перейти в розділ Programming > Tools > Software Objects > PID (рис. 9.3)
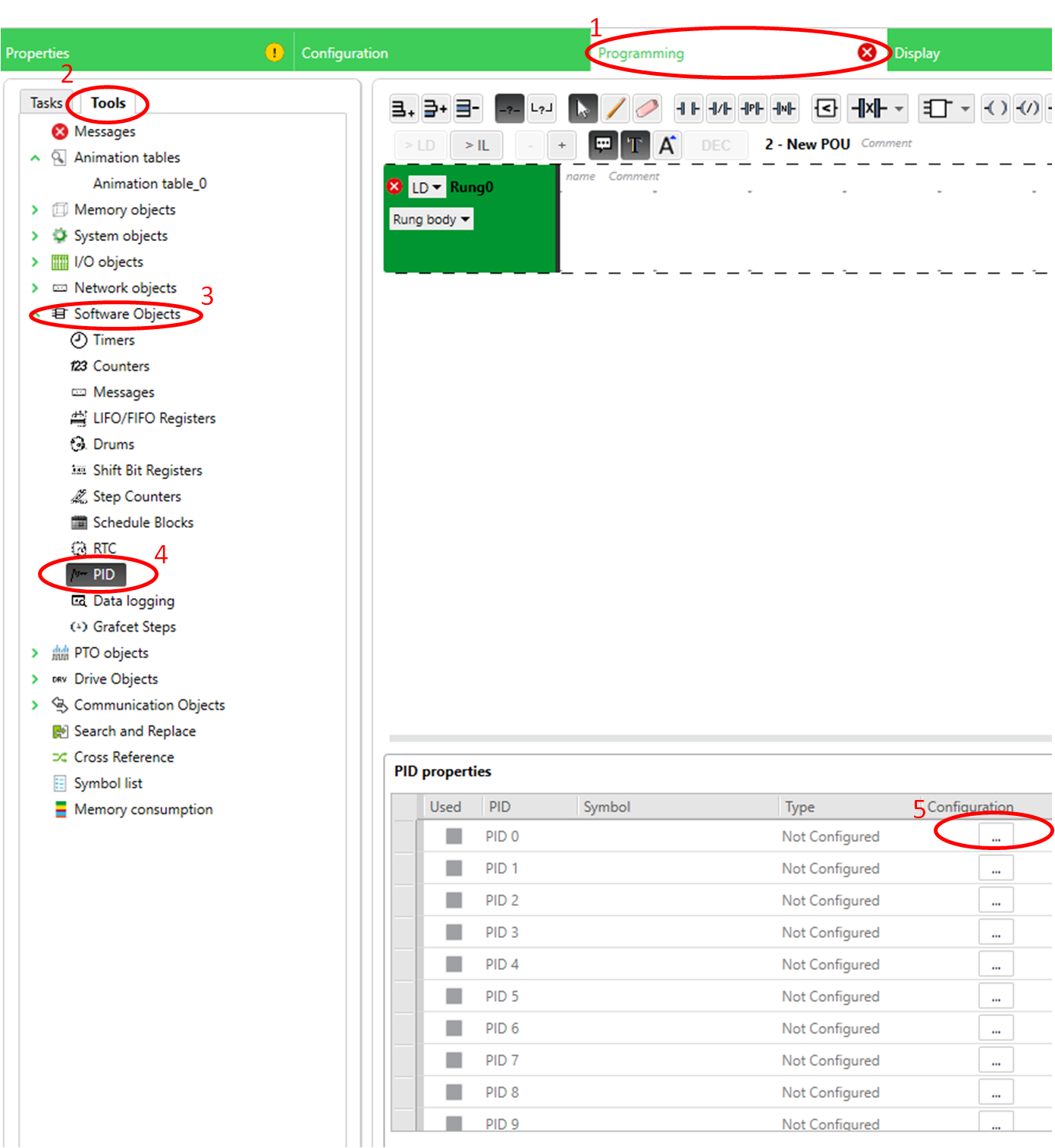
Рис. 9.3 Конфігурування PID регуляторів
-
У вікні PID propertis можна побачити перелік PID регуляторів, доступних для обраної моделі ПЛК.
-
Виконайте конфігурацію регулятора PID 0. Для цього необхідно натиснути на кнопку з трьома крапками навпроти регулятора
PID 0в колонціConfiguration(рис 9.3).
Відкриється вікно налаштування PID регулятора PID 0 Assistent (рис. 9.4).
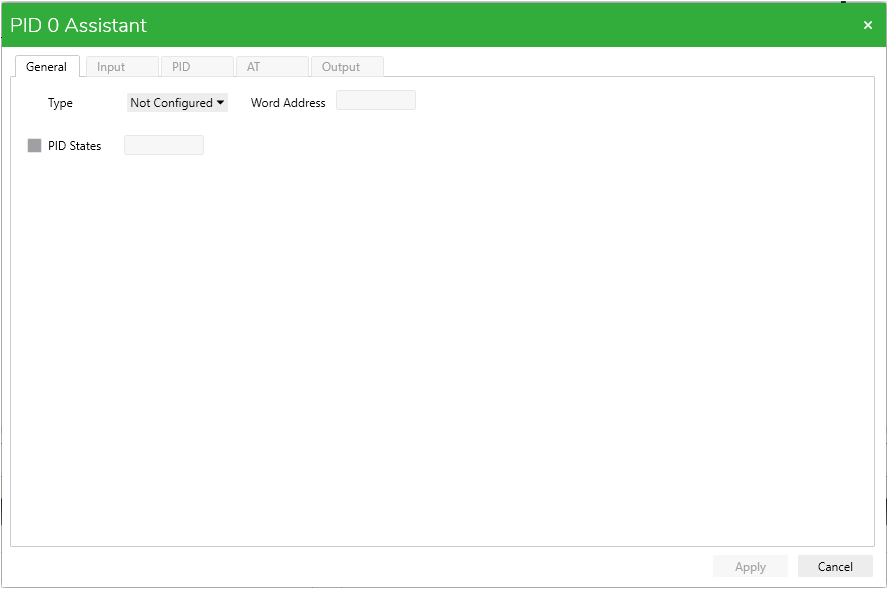
Рис. 9.4 Вікно конфігурації PID Assistent
Вкладка General дозволяє обрати тип регулятора з переліку (рис.9.5):
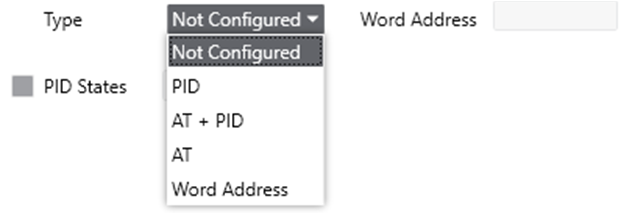
Рис. 9.5. Вибір типу регулятора
- Ознайомтеся з типами регуляторів:
- Not Configured - регулятор не сконфігуровано, в програмі не використовується
- PID - Звичайний режим роботи PID-регулятора, активний за замовчуванням, коли PID-регулятор запускається.
- AT + PID - У цьому режимі активується функція автоматичної настройки при запуску PID-регулятора. Після виконання автонастройки регулятор починає працювати як звичайний PID.
- AT - Режим автонастройки - У цьому режимі активується функція автоматичної настройки при запуску PID-регулятора. Після виконання автонастройки регулятор зупиняється.
- Word Adress - Динамічний режим роботи, при якому необхідний режим роботи можна змінити програмним шляхом, змінюючи значення змінної Word Adress
- Оберіть режим
PID
4. Налаштування входів регулятора
Вкладка Input дозволяє провести налаштування входів PID-регулятора
-
Перейдіть у вкладку Input. Ознайомтеся з її змістом.
-
У зоні Measure, вказується змінна, що відповідає за поточне значення вимірюваної величини. Вкажіть змінну %MW10.
-
Зона Conversion дозволяє провести масштабування значення вимірюваної величини у більш зручний вигляд. Вкажіть 0-100%, що буде значити масштабування рівня з діапазону 0-10000 у вказаний діапазон у %.
-
Зона Filter дозволяє провести цифрове фільтрування вимірювальної величини. Залиште без змін.
-
Зона Alarms дозволяє провести налаштування тривог, про вихід регульованого параметру за допустимі межі. Залиште без змін.
Таким чином налаштування матиме вигляд як на рис. 9.6.
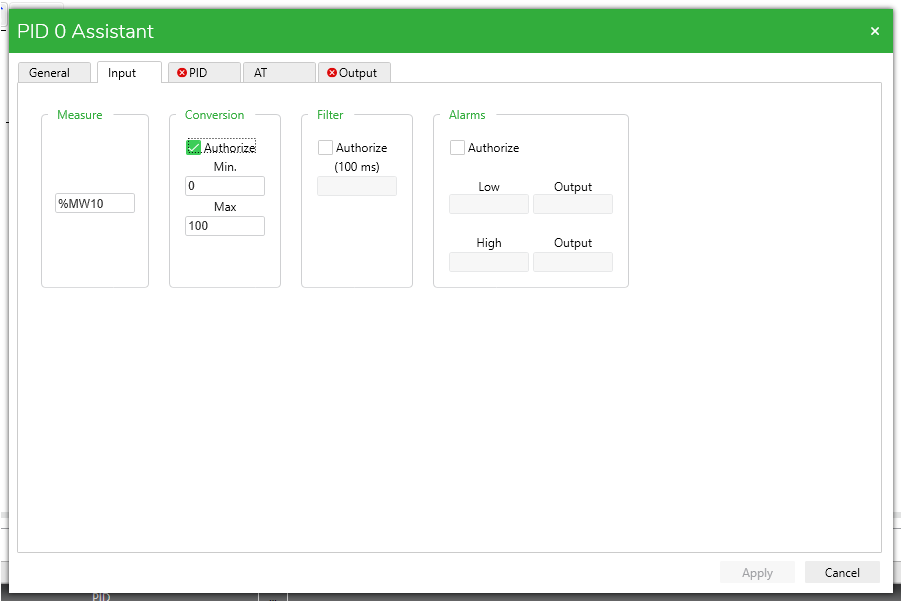
Рис. 9.6. Налаштування входів PID-регулятора
5. Налаштування параметрів регулятора
У вкладці PID проводиться конфігурація основних параметрів регулятора.
-
Перейдіть у вкладку PID. Подивіться та змініть налаштування, як вказано нижче.
-
Зона Setpoint - відповідає за задане значення регульованої змінної. Тут можна записати як константу (наприклад 50), так і адресу змінної (наприклад %MW50) - для можливості зміни заданого значення програмно під час роботи на виробництві. У якості завдання вкажіть адресу змінної
%MW50 -
Зона Corrector type - дозволяє обрати режим роботи регулятора ПІ чи ПІД. Вкажіть режим ПІ.
- Parametrs - параметри налаштування ПІД-регулятора. Дозволяється записувати як константи, так і адреси змінних для програмної зміни під час роботи. Наступні параметри:
- Кр - коефіцієнт пропорційності, вкажіть 10, що буде значити 0,1
- Ті - час інтегрування, вкажіть 200, що буде значити 20 с
- Тd - час диференціювання
- Sampling period - частота викликів PID-регулятора. Вона повинна бути від 1 (0,01 с) до 10000 (100 с). Вкажіть 1.
Таким чином налаштування матиме вигляд як на рис. 9.7.
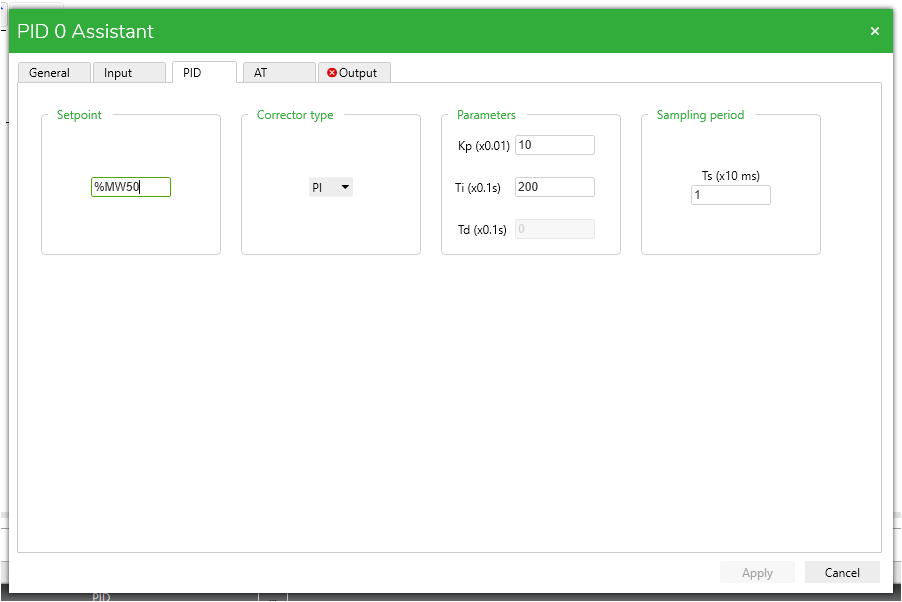
Рис. 9.7. Налаштування параметрів PID-регулятора
6. Налаштування виходу регулятора
У вкладці Output проводиться конфігурація виходу регулятора:
-
Перейдіть у вкладку Output. Подивіться та змініть налаштування, як вказано нижче.
-
Action - напрям дії PID-регулятора, прямий - Direct (наприклад, якщо об’єкт керування нагрівач), зворотній - Revers (наприклад, якщо об’єкт керування охолоджувач). Або з можливістю перемикання - Bit Address. У цьому випадку напрям дії можна програмно змінювати за допомогою дискретної змінної, що вказується у відповідному полі. Вкажіть
Direct -
Limits - дозволяє виконати обмеження виходу PID регулятора. Вкажіть
Disable(без обмежень). - Manual mode - ручний режим, дозволяє керування виходом регулятора в ручному режимі:
- Disable - ручний режим відключено.
- Enable - ручний режим постійно включений
- Bit Address - з можливістю перемикання руч/авто. У цьому випадку режим роботи можна змінювати за допомогою дискретної змінної, що вказується у відповідному полі. “0” - автоматичний режим, “1” - ручний. Виберіть цей режим та вкажіть
%M0. - Output - вихід регулятора в ручному режимі. Вкажіть
%MW20.
-
Analog Output - аналоговий вихід PID регулятора. Вкажіть
%MW20. - Output PWM - у випадку, коли необхідно керувати об’єктом за принципом широтно-імпульсної модуляції, обирається дана опція. У такому випадку задається дискретний вихід регулятора, а період імпульсів. Більш детально про даний режим роботи у наступному розділі.
Таким чином налаштування матиме вигляд як на рис. 6.8.
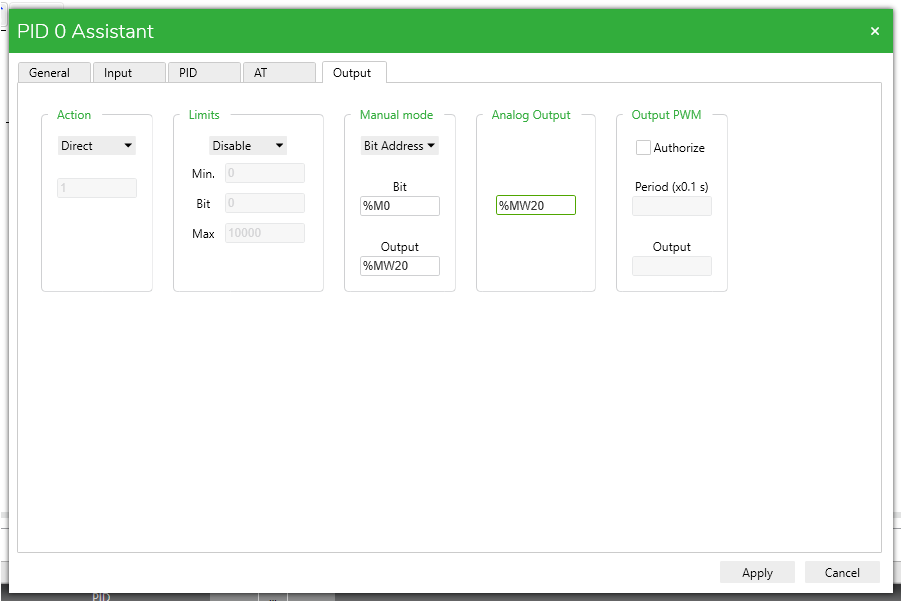
Рис. 9.8. Налаштування виходу PID-регулятора
- Натисніть Apply для підтвердження конфігурації.
7. Використання PID регулятора в програмі.
Для того, щоб створений PID-регулятор почав працювати необхідно його викликати в програмі.
- Створіть
Rung, за допомогою блоку Operation Block зробіть викликPID 0рис. 9.9.

Рис. 9.9. Програмування виклику PID-регулятора
За такого виклику PID-регулятора він буде безумовно працювати постійно з моменту запуску ПЛК. За необхідності можна додати умови запуску регулятора так само, як і в інших варіантах використання Operation Block.
8. Виконання індивідуального завдання згідно варіанту
- Виконайте конфігурацію регулятора згідно з Вашим варіантом, та надішліть файл проекту на перевірку.
9. Перевірка роботи PID-регулятора
-
Перевірити роботу PID-регулятора можливо лише за наявності фізичного ПЛК М221. Якщо такий є - перевірте роботу.
-
У разі відсутності перевірки на реальному ПЛК пропонується ознайомче відео по роботі PID-регулятора М221
Питання до захисту
- Розкажіть про принципи роботи ПІД-регулятору.
- Розкажіть загальні кроки щодо налаштування та використання ПІД-регулятору в ПЛК М221.
- Розкажіть про налаштування параметрів у вкладці INPUT.
- Розкажіть про налаштування параметрів у вкладці PID.
- Розкажіть про налаштування параметрів у вкладці OUTPUT.
- Розкажіть про методику перевірки роботи регулятору.
Розробив лабораторну - Полупан Володимир. АКТСУ НУХТ