Керування роботизованою установкою на мові LD в ПЛК M221: практична частина
Мета: навчитися створювати програми користувача на мові LD для керування роботизованою установкою.
Необхідне програмне забезпечення. EcoStruxure Machine Expert Basic
Опис роботи установки.
1. Опис роботи реальної установки.
При виконанні даної лабораторної роботи студенти виконують розробку прикладного програмного забезпечення ПЛК для керування роботизованою навчальною установкою (рис. 7.1)

Рис. 7.1 Розміщення навчальних установок в навчальній лабораторії
Даний маніпулятор складається з таких елементів (рис. 7.2):
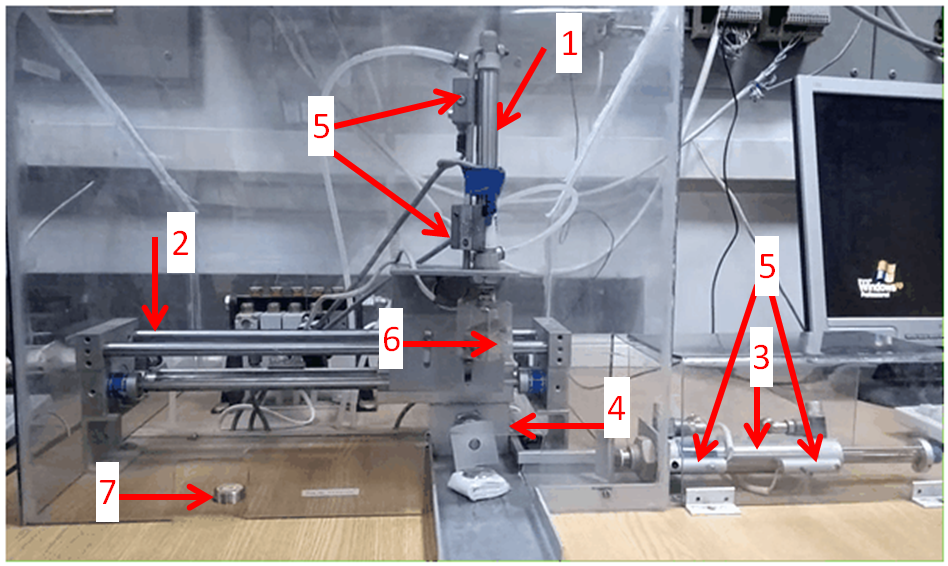
Рис. 7.2 Опис функціональних елементів
- 1-4 - пневмоциліндри - для здійснення переміщень ;
- 5 - герконові датчики кінцевого положення - дискретні датчики, які призначені для відслідковування поточного положення кожного пневмоциліндра (по 2 датчика на кожен пневмоциліндр, для сигналізації кожного із кінцевих положень)
- 6 електромагніт - може захоплювати невеликі металеві елементи (найчастіше монетки)
- 7 датчик наявності металевих елементів (монетки) - дискретний датчик спрацьовує, коли поруч з ним знаходиться металевий елемент.
Один з можливих алгоритмів роботи установки показано на анімаційному рисунку 7.3.
Рис. 7.3 Демонстрація роботи лабораторної установки
Після натискання кнопки “Пуск” і за умови наявності металевої деталі на датчику наявності деталі 7. Необхідно перемістити електромагніт за допомогою пневмоциліндра 2 в положення “ліворуч”, далі за допомогою пневмоциліндра 1 здійснюється переміщення електромагніту “вниз” до деталі. Після цього електромагніт вмикається. Далі електромагніт із захопленою металевою деталлю піднімається у “верхнє” положення за допомогою пневмоцилінда 1. Переміщується в положення “праворуч” за допомогою пневмоциліндра 2. За допомогою пневмоциліндра 1 електромагніт з деталлю опускається в “нижнє” положення. Електромагніт відключається і повертається у “верхнє” положення за допомогою пневмоциліндра 1. За допомогою пневмоциліндру 4 деталь виштовхується “вперед” і пневмоциліндр 4 повертається у вихідне положення. Цикл повторюється.
Для керування даною установкою з контролера. Усі його функціональні елементи підключено до відповідних входів/виходів ПЛК М221.
Таким чином конфігурація ПЛК буде наступною:
-
Дискретні входи: кнопка “Пуск”, 8 датчиків кінцевого положення (по 2 на кожен пневмоциліндр), датчик наявності металевих деталей.
-
Дискретні виходи: сигнал керування електромагнітом, 5 сигналів керування пневмоциліндрами.
Зверніть увагу, пневмоциліндр 2 - є бістабільним, тобто для керування ним потрібно 2 сигнали: один - для руху ліворуч, інший, для руху праворуч.
Інші циліндри є моностабільними, тобто керуються одним дискретним сигналом - логічна “1” - пневмоциліндр у витягнутому положенні, логічний “0” - у початковому (засунутому).
4.2. Опис роботи віртуальної установки.
Оскільки доступ до реального лабораторного стенду може бути відсутнім було розроблену віртуальну повнофункціональну модель даного лабораторного стенду(рис. 7.4):
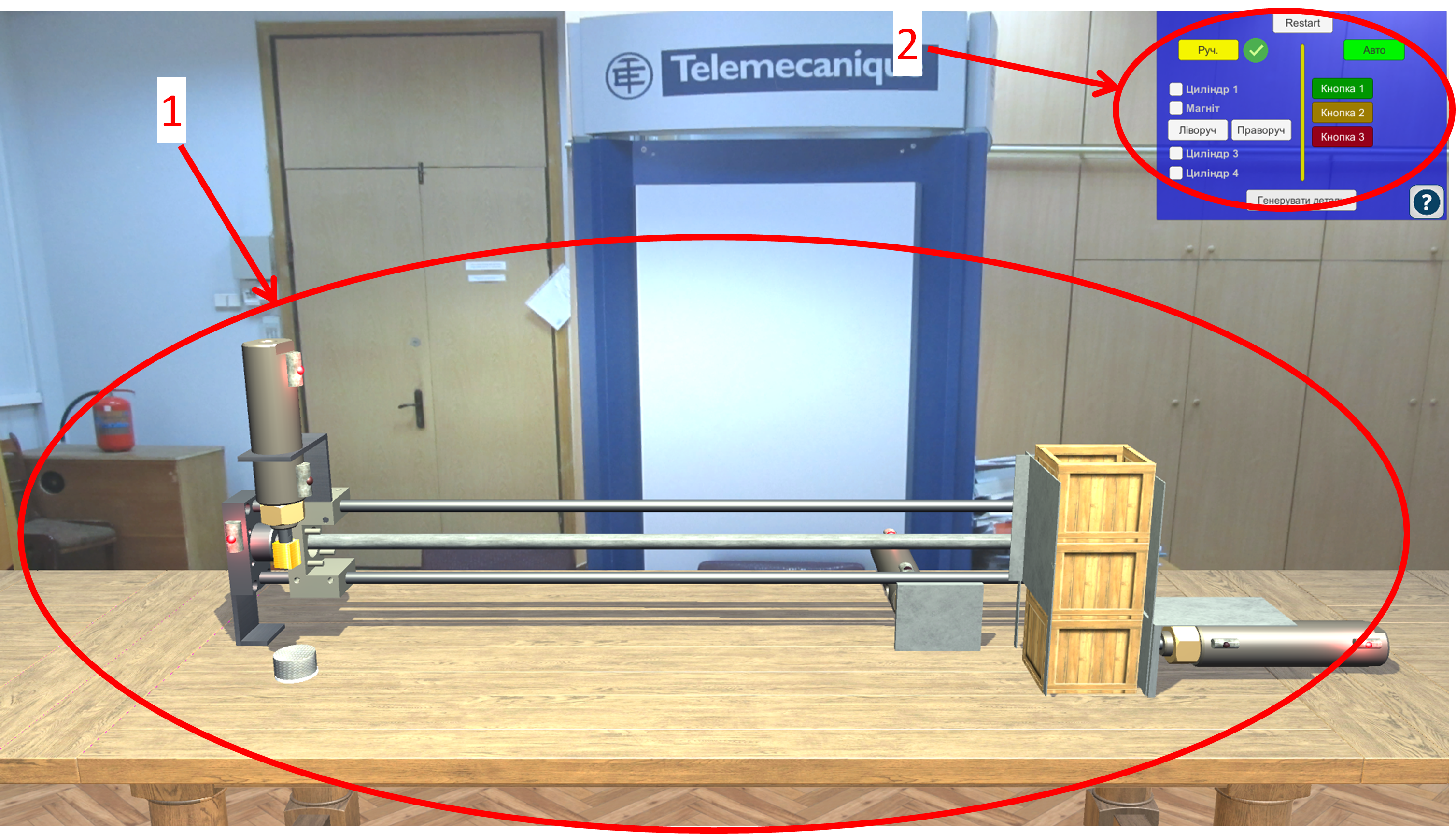
Рис. 7.4. Загальний вигляд віртуального лабораторного стенду
Віртуальний лабораторний стенд умовно ділиться на 2 частини:
1 - безпосередньо візуальна модель лабораторної установки;
2 - панель керування установкою
Один з можливих алгоритмів роботи віртуальної установки показано на анімаційному рисунку 7.5.
Рис. 7.5 Демонстрація роботи віртуальної лабораторної установки
Функціонально дана установка складається з таких елементів (Рис. 7.6):
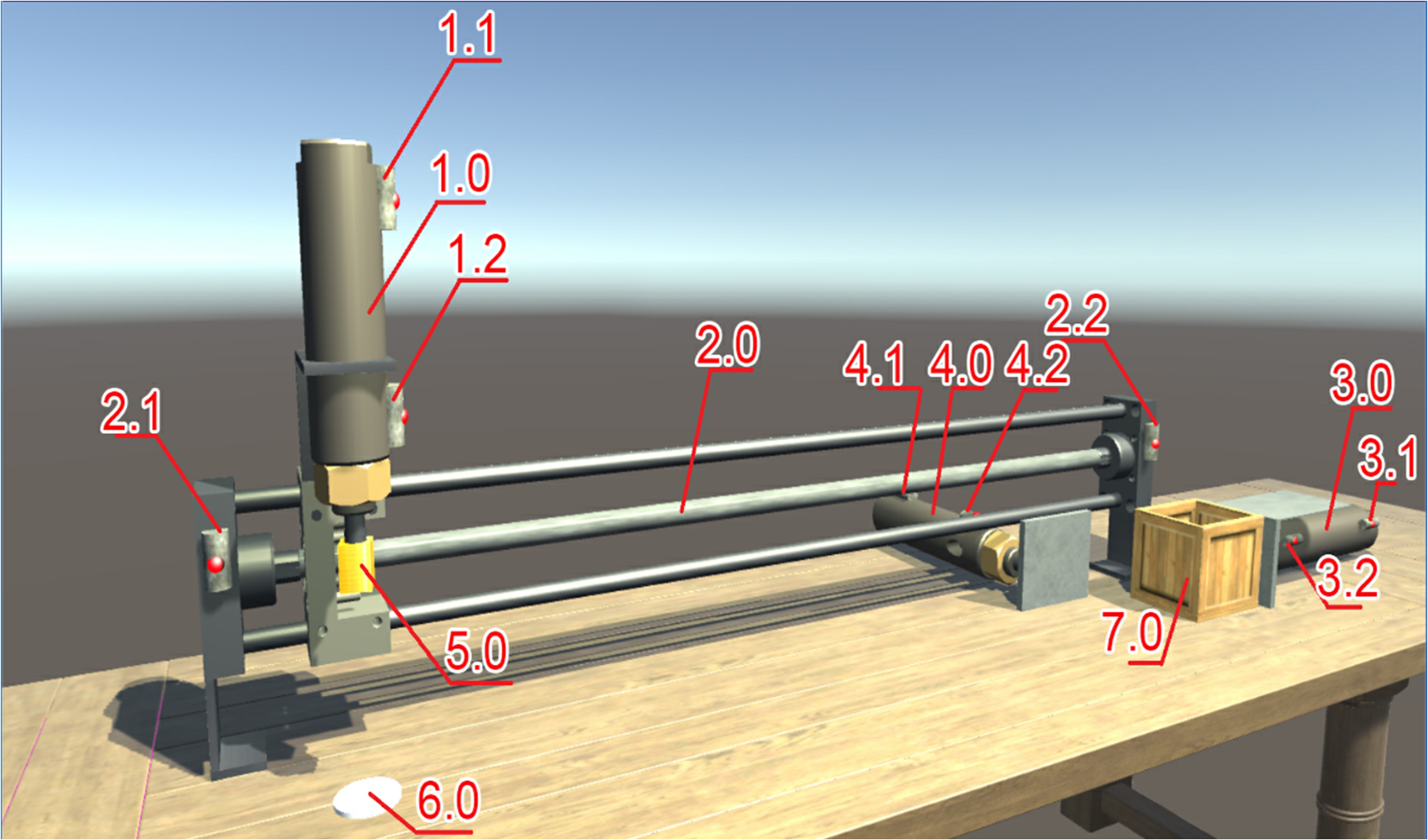
Рис. 7.6 Позначення функціональних елементів віртуальної установки
Таблиця 7.1. Опис елементів установки
| Позначення | Опис |
|---|---|
| 1.0 | Пневмоциліндр з моностабільним керуванням (сигнал «1» - пряма дія, сигнал «0» зворотна дія) |
| 1.1 | Датчик кінцевого положення пневмоциліндра 1.0 |
| 1.2 | Датчик кінцевого положення пневмоциліндра 1.0 |
| 2.0 | Пневмоциліндр з бістабільним керуванням (має два сигнали керування перший для переміщення «праворуч», другий для переміщення «ліворуч») |
| 2.1 | Датчик кінцевого положення пневмоциліндра 2.0 |
| 2.2 | Датчик кінцевого положення пневмоциліндра 2.0 |
| 3.0 | Пневмоциліндр з моностабільним керуванням (сигнал «1» - пряма дія, сигнал «0» зворотна дія) |
| 3.1 | Датчик кінцевого положення пневмоциліндра 3.0 |
| 3.2 | Датчик кінцевого положення пневмоциліндра 3.0 |
| 4.0 | Пневмоциліндр з моностабільним керуванням (сигнал «1» - пряма дія, сигнал «0» зворотна дія) |
| 4.1 | Датчик кінцевого положення пневмоциліндра 4.0 |
| 4.2 | Датчик кінцевого положення пневмоциліндра 4.0 |
| 5.0 | Електромагніт (сигнал «1» - включити, сигнал «0» відключити) |
| 6.0 | Датчик наявності деталі |
| 7.0 | Коробка для деталей |
Робота з віртуальним стендом відбувається з панелі керування (рис. 7.7).
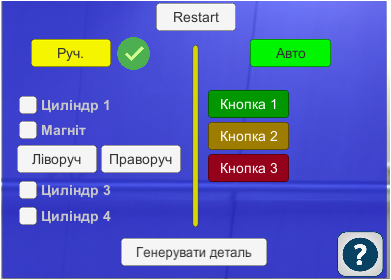
Рис. 7.7. Панель керування віртуальним лабораторним стендом
Віртуальний лабораторний стенд може функціонувати у двох режимах “Ручний” і “Автоматичний”
Переключення між цими двома режимами відбувається за допомогою відповідних кнопок “Руч.” і “Авто”.
В ручному режимі користувач може керувати усіма функціональними елементами з панелі керування на власний розсуд за допомогою наступних кнопок:
-
“Циліндр 1” - керування пневмоциліндром 1;
- “Магніт” - керування магнітом (вкл/викл);
- “Ліворуч”/”Праворуч” - керування пневмоциліндром 2;
- “Циліндр 3”- керування пневмоциліндром 3;
- “Циліндр 4”-керування пневмоциліндром 4;
У автоматичному режимі керування стендом відбувається із ПЛК відповідно до закладеного у нього алгоритму.
Для автоматичного режиму передбачено дві вільнопрограмовані кнопки: “Кнопка 1” і “Кнопка 2”, їх призначення визначає розробник програми для ПЛК.
Зверніть увагу, “Кнопка 3” у даній версії віртуального стенду не задіяна!!!
За допомогою кнопки “Генерувати деталь” можна створити деталь для подальшого використання. Працює як в ручному так і в автоматичному режимі.
Кнопка “Restart” - скидає роботу лабораторного стенду до початкового стану.
Кнопка із зображенням знаку запитання відкриває сторінку з довідковою інформацією.
Порядок виконання роботи
1. Завантаження віртуальної установки.
-
Завантажте віртуальну установку за посиланням і розархівуйте завантажений архів.
-
У тому місці, куди Ви розархівували завантажений архів знайдіть папку “ProjectProgrammer_V1.3”, всередині даної папки знаходиться виконуваний файл “ProjectProgrammer_V1.3.exe”, який необхідно запустити.
-
Перед запуском віртуальної лабораторної установки відкриється конфігураційне вікно (рис. 7.8)
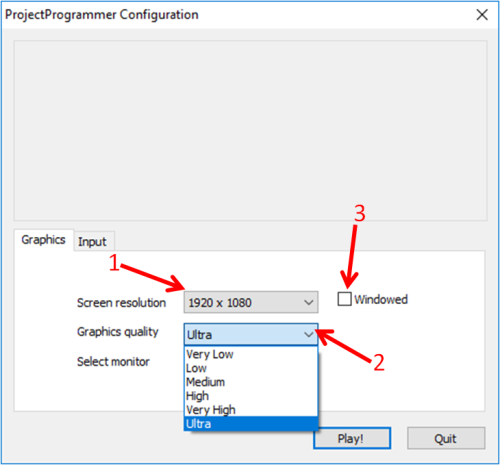
Рис. 7.8. Вікно початкової конфігурації віртуального лабораторного стенду
У даному вікні є можливість обрати розподільчу здатність програми (1), а також якість відображення графіки в програмі (2).
Зверніть увагу, що чим більша якість відображуваної графіки - тим більше потребується комп’ютерних ресурсів на роботу програми. У випадку, коли обчислювальних ресурсів вашого комп’ютера буде недостатньо, може спостерігатися сповільнена робота віртуального стенду. У такому випадку рекомендується понизити рівень налаштувань якості графіки, а також розподільчу здатність програми.
За допомогою опції (3) можна обрати, як саме буде запускатись віртуальна установка - в повноекранному чи у віконному.
Працездатність даної лабораторної установки протестовано на комп’ютерах з ОС Windows 10 x64
2. Робота з віртуальною установкою в ручному режимі.
-
У ручному режимі за допомогою панелі керування перевірте роботу кожного з фукнкціональних елементів віртуального стенду.
-
У ручному режимі за допомогою панелі керування виконайте наступну задачу.
-
За допомогою пневмоциліндру 3 підготуйте одну коропку для подальшої її наповнення деталями.
- За допомогою кнопки “Генерувати деталь” створіть одну деталь і перемістіть її в підготовлену коробку за допомогою панелі керування.
- Аналогічним чином перемістіть у дану коробку ще дві деталі (загальна кількість деталей у коробці має бути 3).
- За допомогою пневмоциліндру 4 перемістіть коробку “вперед” і підготуйте наступну коробку для наступного циклу роботи.
- Для того, щоб скинути програму в початковий стан скористайтеся кнопкою “Restart”.
-
3. Опис розробки програми ПЛК для керування віртуальною лабораторною установкою
- Ознайомтеся з особливостями побудови програми користувача для ПЛК при роботі з віртуальною установкою.
Для того, щоб мати можливість прив’язати розроблювану програму для ПЛК з віртуальною установкою має існувати певний інформаційний зв’язок між віртуальним стендом і симулятором ПЛК М221. Віртуальний лабораторний стенд має можливість підключатися до симулятора ПЛК М221 за допомогою протоколу Modbus.
4. Завантаження проекту-шаблону.
Для того, щоб організувати правильний обмін даними між стендом і контролером було створено спеціальний проект-шаблон, який вже містить програму для обміну даними з віртуальним лабораторним стендом, а також у ньому визначено перелік змінних з якими Вам доведеться працювати.
-
Знайдіть, у тому місці де було розархівовано раніше завантажений архів, файл проекту-шаблону PP.smbp та відкрийте його.
-
Ознайомтеся, зі вмістом даного проекту, переконайтеся, що вкладка Programming містить в розділі Master Task програму “1 Connection” (рис. 7.9).
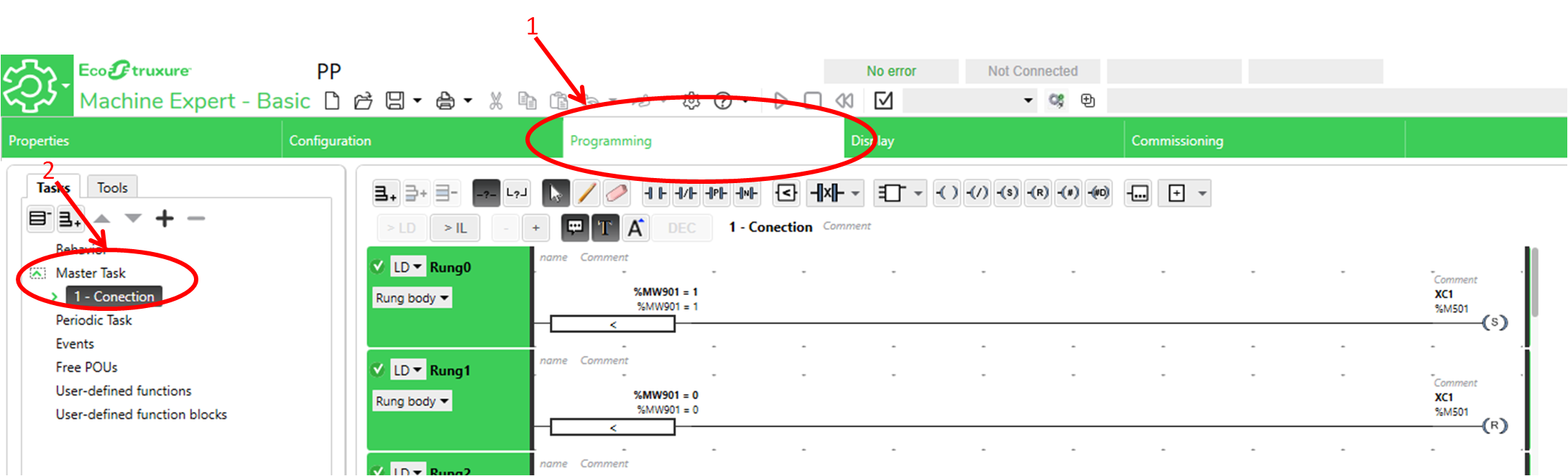
Рис. 7.9. Вміст проекту-шаблону для програмування віртуального лабораторного стенду.
5. Розробка програми керування
- Для того, щоб почати програмувати роботу віртуального лабораторного стенду необхідно в даному проекті створити нову програму POU. (рис. 7.10);
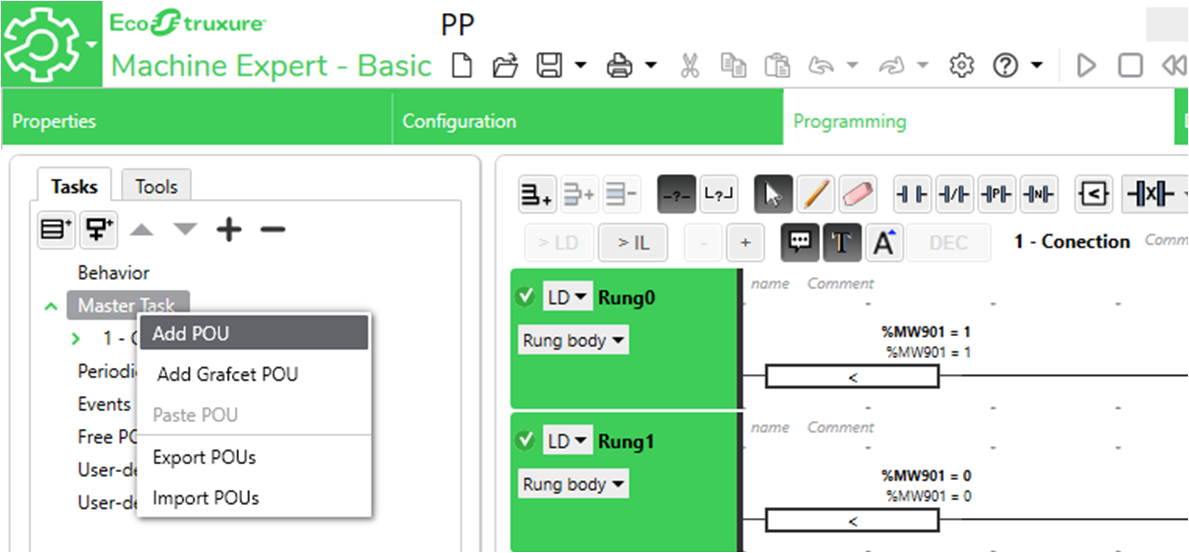
Рис. 7.10. Створення POU.
В створеній програмі буде реалізований простий алгоритм:
- Після натискання програмованої кнопки “Кнопка 1” необхідно опустити електромагніт у нижнє положення.
- При досягненні нижнього положення необхідно підняти магніт у початкове положення.
Відповідно до поставленого завдання програма буде складатися з двох умов і двох дій. Перша частина алгоритму буде звучати наступним чином: “При спрацюванні Кнопка 1 необхідно увімкнути Пневмоциліндр 1”
- Запишіть даний фрагмент програми на мові LD (рис. 7.11).
Але в такому випадку має виникнути питання адресації. А точніше, до яких адрес пам’яті контролера необхідно звернутися для того, щоб прочитати стан “Кнопка 1”, та подати сигнал керування на “Циліндр 1”?
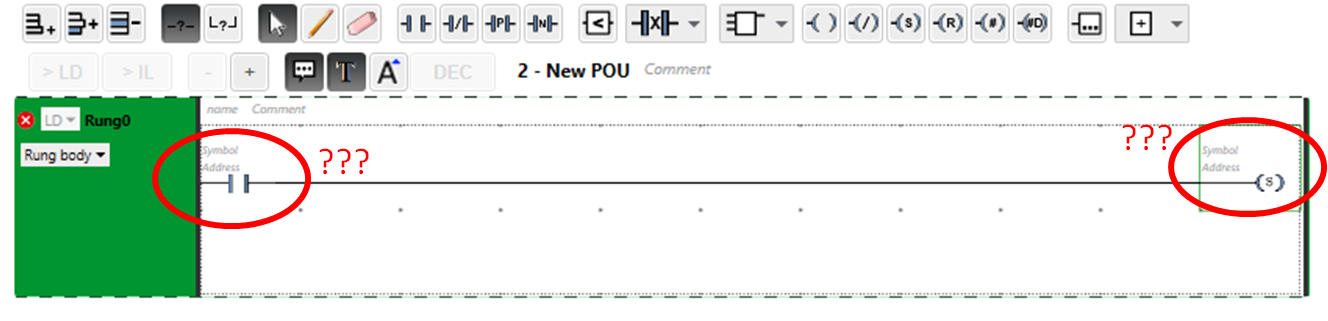
Рис. 7.11. Фрагмент програми керування
Відповідь на дане питання надає таблиця 7.2. у якій описані всі сигнали і відповідні їм в проекті символьні назви змінних.
Таблиця 7.2 опис змінних ПЛК
| Позначення на рис. 4.6 | Опис | Назва змінної ПЛК (Symbol) | Адреса |
|---|---|---|---|
| Кнопка 1 – вільно програмована кнопка | XBTN1 | %M510(%MW910, %MW1007 - запис) | |
| Кнопка 2 – вільно програмована кнопка | XBTN2 | %M511(%MW911, %MW1008 - запис) | |
| 1.0 | Пневмоциліндр з моностабільним керуванням (сигнал «1» - пряма дія, сигнал «0» зворотна дія) | YC1 | %M451(%MW1001) |
| 1.1 | Датчик кінцевого положення пневмоциліндпа 1.0 | XNC1 | %M502(%MW902) |
| 1.2 | Датчик кінцевого положення пневмоциліндпа 1.0 | XC1 | %M501(%MW901) |
| 2.0 | Пневмоциліндр з бістабільним керуванням (має два сигнали керування перший для переміщення «праворуч», другий для переміщення «ліворуч») | YC2 (праворуч) YNC2 (ліворуч) | %M452(%MW1002) %M453(%MW1003) |
| 2.1 | Датчик кінцевого положення пневмоциліндпа 2.0 | XNC2 | %M504(%MW904) |
| 2.2 | Датчик кінцевого положення пневмоциліндпа 2.0 | XC2 | %M503(%MW903) |
| 3.0 | Пневмоциліндр з моностабільним керуванням (сигнал «1» - пряма дія, сигнал «0» зворотна дія) | YC3 | %M454(%MW1004) |
| 3.1 | Датчик кінцевого положення пневмоциліндпа 3.0 | XNC3 | %M506(%MW906) |
| 3.2 | Датчик кінцевого положення пневмоциліндпа 3.0 | XC3 | %M505(%MW905) |
| 4.0 | Пневмоциліндр з моностабільним керуванням (сигнал «1» - пряма дія, сигнал «0» зворотна дія) | YC4 | %M455(%MW1005) |
| 4.1 | Датчик кінцевого положення пневмоциліндпа 4.0 | XNC4 | %M508(%MW908) |
| 4.2 | Датчик кінцевого положення пневмоциліндпа 4.0 | XC4 | %M507(%MW907) |
| 5.0 | Електромагніт (сигнал «1» - включити, сигнал «0» відключити) | YMAG | %M456(%MW1006) |
| 6.0 | Датчик наявності деталі | XDET | %M509(%MW909) |
| 7.0 | Коробка для деталей |
Таким чином, з таблиці 7.2 видно, що за програмовану кнопку “Кнопка 1” відповідає змінна XBTN 1. А сигналом керування пневмоциліндром 1 є змінна YC1.
Тому наведений на рис. 7.11. набуде наступного вигляду:
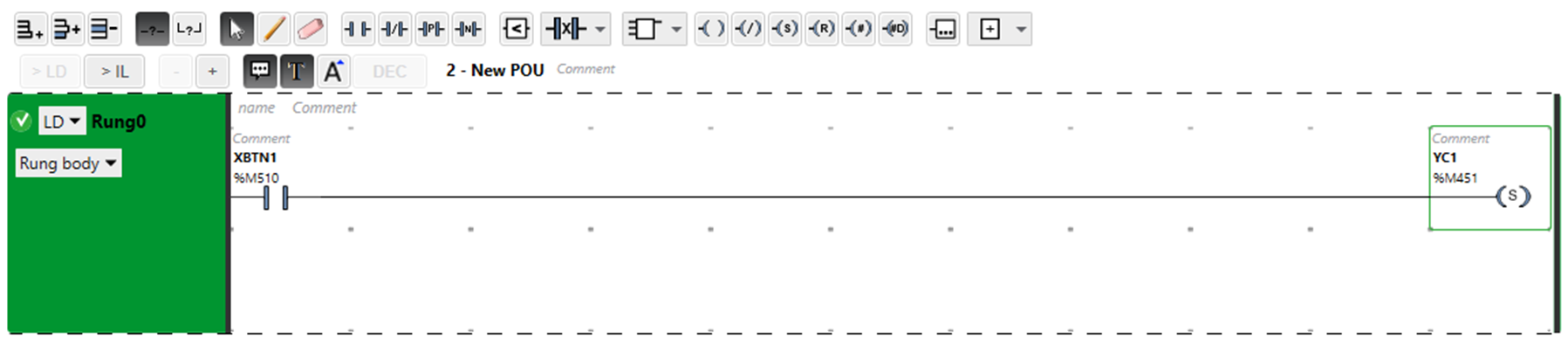
Рис. 7.12. Фрагмент програми керування
Зверніть увагу, що символьні назви змінних необхідно вводити в поле Symbol, а не в поле Address.
- Аналогічно реалізовуйте другу частину алгоритму, яка буде звучати наступним чином: “при спрацюванні датчика кінцевого положення пневмоциліндра 1 (пневмоциліндр у висунутому положенні) необхідно вимкнути Пневмоциліндр 1”.
Згідно таблиці 7.2 необхідному датчику кінцевого положення в програмі відповідатиме змінна ХС1.
Таким чином програма керування виглядатиме наступним чином:
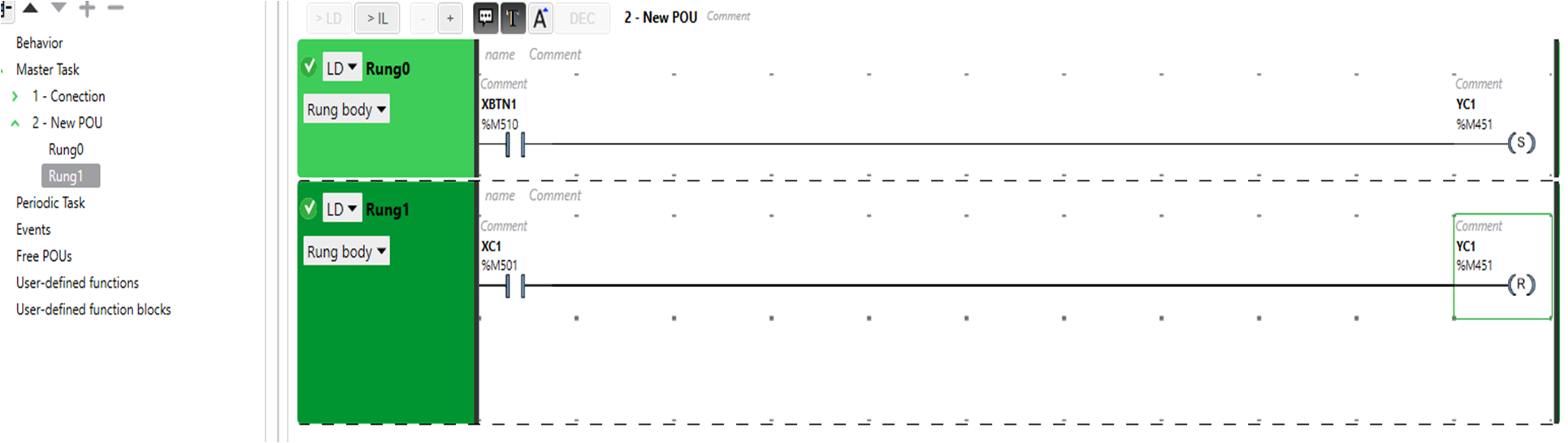
Рис .7.13. Фрагмент програми керування
6. Перевірка роботи алгоритму
-
Запустіть імітатор ПЛК та переведіть його в RUN.
-
Переведіть віртуальний лабораторний стенд в автоматичний режим за допомогою кнопки “Авто”.
У випадку, якщо симулятор ПЛК не запущено, або якщо через інші проблеми віртуальний лабораторний стенд не зможе підключитися до симулятора ПЛК, з’явиться повідомлення про помилку (рис. 7.14).
Рис. 7.14. Можлива помилка при переході в автоматичний режим
-
Якщо помилки не виникло можна перевірити роботу розробленої програми натисканням програмованої кнопки “Кнопка 1”. Пневмоциліндр 1 має висунути свій шток і при досягненні кінцевого положення автоматично повернутися у початкове положення.
-
За роботою програми можна спостерігати в режимі “Онлайн”, розмістивши поруч вікна віртуального лабораторного стенду та редактора Machine Expert Basic (рис. 7.15)
Рис. 7.15 Візуалізація роботи розробленого алгоритму керування
7. Опис задачі роботи віртуальної установки для самостійного виконання
- У відповідності до функціональних можливостей віртуального лабораторного стенду і засвоєного матеріалу з поточної дисципліни пропонується розв’язати задачі програмування трьох рівнів складності:
Задача базового рівня складності:
Необхідно розробити програму для ПЛК по керуванні роботою віртуальним лабораторним стендом за наступним алгоритмом:
- При натисканні “Кнопка 1” і за умови наявності деталі на датчику наявності деталі необхідно опустити магніт у нижнє положення.
- Підняти магніт з деталлю у верхнє положення
- Перемістити магніт з деталлю праворуч
- Опустити магніт з деталлю у нижнє положення
- зробити витримку часу - 3 секунди
- відключити магніт
- підняти магніт
- За допомогою Пневмоциліндра 4 виштовхнути деталь вперед
- Повернути пневмоциліндр 4 у початкове положенні і одночасно перемістити магніт у положення ліворуч
- цикл повторюється
Задача середнього рівня складності:
Необхідно розробити програму для ПЛК по керуванні роботою віртуальним лабораторним стендом за наступним алгоритмом:
- При натисканні “Кнопка 1” і за умови наявності деталі на датчику наявності деталі необхідно
- Підготувати коробку для деталі за допомогою пневмоциліндра 3 (висунути шток і повернути у вихідне положення)
- опустити магніт у нижнє положення.
- Підняти магніт з деталлю у верхнє положення
- Перемістити магніт з деталлю праворуч
- Опустити магніт з деталлю у підготовлену коробку
- зробити витримку часу - 3 секунди
- відключити магніт
- підняти магніт
- За допомогою Пневмоциліндра 4 виштовхнути коробку з деталлю вперед
- Повернути пневмоциліндр 4 у початкове положення і одночасно перемістити магніт у положення ліворуч
- цикл повторюється
Задача високого рівня складності:
Необхідно розробити програму для ПЛК по керуванні роботою віртуальним лабораторним стендом за наступним алгоритмом:
- При натисканні “Кнопка 1” і за умови наявності деталі на датчику наявності деталі необхідно
- Підготувати коробку для деталі за допомогою пневмоциліндра 3 (висунути шток і повернути у вихідне положення)
- опустити магніт у нижнє положення.
- Підняти магніт з деталлю у верхнє положення
- Перемістити магніт з деталлю праворуч
- Опустити магніт з деталлю у підготовлену коробку
- зробити витримку часу - 3 секунди
- відключити магніт
- підняти магніт
- всього в 1 коробку необхідно помістити 3 деталі
- За допомогою Пневмоциліндра 4 виштовхнути коробку з трьома деталями вперед
- Повернути пневмоциліндр 4 у початкове положення і одночасно перемістити магніт у положення ліворуч
- цикл повторюється
Зверніть увагу, що віртуальний лабораторний стенд знаходиться в стадії розробки і тестування тому цілком можлива ситуація, коли коробки будуть застрягати, чи магніт буде повертатись “лівіше” свого крайнього лівого положення. У таких випадках рекомендується скинути програму кнопкою “Restart”.
8. Робота з реальною установкою
Після тестування програми на віртуальній установці необхідно перевірити розроблений алгоритм на реальній установці в лабораторії.
- У програмі замініть змінні з таблиці 7.2 на адреси змінних, що відповідають за актуальне підключення датчиків і сигналів пневмоциліндрами до ПЛК.
- Перевірте конфігурацію процесорного модуля в проекті.
Питання до захисту
- Розкажіть про лабораторну установку.
- Як відбувається прив’язка програми користувача в EcoStruxure Machine Expert Basic до віртуальної установки.
- Розкажіть про алгоритм роботи програми користувача з віртуальною установкою, який був вибраний Вами для реалізації.
- Розкажіть про усі контакти і котушки, які були використані при створенні програми користувача. Чому були вибрані саме вони?
- Розкажіть про усі функціональні блоки які були використані при створенні програми користувача. Чому були вибрані саме вони?
Приклад роботи з віртуальним стендом можна подивитися у наступному відео: https://youtu.be/AlzEJIRDaIQ
Розробив лабораторну - Полупан Володимир. АКТСУ НУХТ