Вступ до керування переміщенням: теоретична частина
1. ВСТУП. СФЕРИ ЗАСТОСУВАННЯ ТА МОТИВАЦІЯ
Керування позиціонуванням є однією з ключових задач сучасної промислової автоматизації. У широкому розумінні — це процес переміщення рухомого об’єкта (осі, столу, руки маніпулятора) до заданого положення з необхідною точністю, швидкістю та характером руху. Без систем позиціонування неможлива робота верстатів з ЧПК, промислових роботів, сортувальних конвеєрів, медичного обладнання, текстильних машин та сотень інших типів устаткування.
1.1. Де застосовують системи позиціонування?
| Галузь | Приклад застосування | Вимога до точності |
|---|---|---|
| Машинобудування | Верстати з ЧПК (токарні, фрезерні, шліфувальні) | від 1 мкм до 10 мкм |
| Електроніка | Автомати паяння, монтажу компонентів (SMT) | від 0,1 мкм до 1 мкм |
| Медицина | Хірургічні роботи, рентгенівські столи, дозатори | від 1 мкм до 100 мкм |
| Пакування | Фасувальні та пакувальні лінії, стекери | від 0,1 мм до 1 мм |
| Роботика | Промислові маніпулятори, AGV-транспорт | від 0,01 мм до 0,5 мм |
| Поліграфія | Принтери, плотери, ламінатори | від 10 мкм до 100 мкм |
| Сонячна енергетика | Трекери сонячних панелей, поворотні платформи | від 0,1° до 1° |
| Текстиль | Ткацькі верстати, машини для вишивки | від 0,1 мм до 1 мм |
Сучасна промисловість ставить дедалі вищі вимоги до точності та продуктивності. Тому прості релейно-контакторні схеми давно поступилися місцем складним цифровим системам керування, які включають мікроконтролери, програмовані логічні контролери (ПЛК), спеціалізовані контролери руху (Motion Controller) та інтелектуальні сервоприводи.
2. ОСНОВНІ ПОНЯТТЯ ТА КЛАСИФІКАЦІЯ ЗАДАЧ ПОЗИЦІОНУВАННЯ
2.1. Базові поняття
| Термін | Визначення та пояснення |
|---|---|
| Вісь (Axis) | Механічний ступінь свободи, яким керує система позиціонування. Може бути лінійною (переміщення в мм/м) або обертальною (кут у градусах чи оборотах). |
| Позиція (Position) | Поточне або задане положення осі у фізичних або логічних одиницях (мм, градуси, одиниці користувача). |
| Швидкість (Velocity) | Перша похідна позиції за часом. У лінійних системах — мм/с; в обертальних — об/хв або °/с. |
| Прискорення (Acceleration) | Друга похідна позиції за часом. Характеризує інтенсивність зміни швидкості (мм/с², °/с²). |
| Ривок (Jerk) | Третя похідна позиції за часом. Визначає плавність зміни прискорення, впливає на вібрації та механічне навантаження. |
| Профіль руху | Залежність позиції/швидкості/прискорення від часу — “траєкторія” осі у часовому просторі. |
| Зворотний зв’язок | Сигнал від давача (енкодера), що повідомляє контролеру про фактичне положення та швидкість осі. |
| Помилка позиціонування | Різниця між заданим і фактичним положенням осі у кожен момент часу. |
| Soft limits | Програмні межі допустимого переміщення осі, що задаються у ПЗ без фізичних кінцевих вимикачів. |
| Home / Референтна позиція | Базова точка відліку осі, що встановлюється процедурою «Homing» при старті системи. |
2.2. Класифікація задач керування позиціонуванням
За типом руху розрізняють такі основні класи задач:
| Клас задачі | Характеристика | Типові застосування |
|---|---|---|
| Point-to-Point (PTP) | Переміщення з точки А в точку Б, траєкторія між точками неважлива. | Пресу, свердлильні верстати, завантажувачі. |
| Рух за профілем швидкості | Вісь рухається з заданою швидкістю без фіксованої кінцевої точки. | Конвеєри, намотувачі, подавачі матеріалу. |
| Контурне керування (CP) | Декілька осей координовано рухаються для відтворення заданої просторової траєкторії. | ЧПК-верстати, роботи-маніпулятори, лазерне різання. |
| Синхронне керування | Одна вісь (ведений) відстежує рух іншої (ведуча) за заданим законом (кулачок, зубчата передача). | Фасувальні машини, прес-лінії, намотувачі. |
| Позиціонування з реєстрацією | Рух коригується за сигналом зовнішнього давача (Touch Probe) для прив’язки до мітки чи деталі. | Різання матеріалу за позначкою, синхронізація конвеєра. |
2.3. Якісні показники системи позиціонування
Під час проектування системи позиціонування оцінюють кілька ключових показників. Точність позиціонування — абсолютна похибка між заданою та фактичною позицією після завершення руху — визначається якістю давача, жорсткістю механіки та алгоритмом регулятора. Повторюваність (repeatability) характеризує розкид позицій при багаторазовому підведенні до однієї точки і часто є важливішою за абсолютну точність у серійному виробництві.
Динамічні характеристики — час позиціонування, максимальна швидкість і прискорення — визначають продуктивність. Жорсткість системи керування забезпечує утримання позиції під навантаженням. Стабільність визначає відсутність коливань і перерегулювань після досягнення мети.
3. ВИКОНАВЧІ ПРИСТРОЇ: ДВИГУНИ ТА ПРИВОДИ
Вибір типу приводу є першим і, часто, найважливішим кроком у проектуванні системи позиціонування. Два основних конкуренти в задачах точного позиціонування — кроковий двигун та серводвигун — мають принципово різну архітектуру та властивості.
3.1. Кроковий двигун (Stepper Motor)
Кроковий двигун є синхронним двигуном із багатополюсним ротором та статором, що містить кілька незалежних обмоток. При комутації обмоток ротор повертається на фіксований кут — «крок» — зазвичай від 0,9° до 1,8°. Сучасні контролери використовують режим мікрокроку, поділяючи основний крок на 8…256 мікрокроків для підвищення плавності та точності без механічних змін.
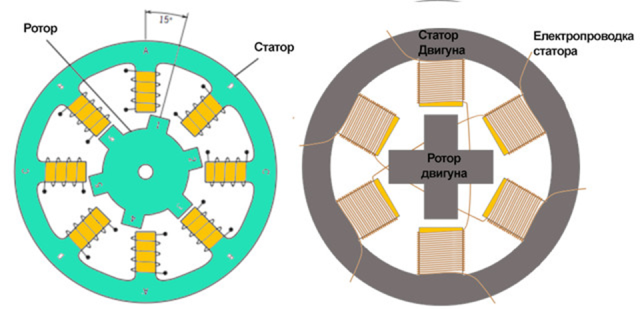
рис.1. Конструкція крокового двигуна

рис.2. Двигун з напівкроковим режимом позиціонування
Мікрокрок
Найбільш часто вживаний спосіб керування кроковими двигунами на сьогоднішній день. Ідея мікрокроку полягає в подачі на обмотки мотора живлення не імпульсами, а сигналу, по своїй формі , що нагадує синусоїду. Такий спосіб зміни положення при переході від одного кроку до іншого дозволяє отримати більш гладке переміщення, роблячи крокові мотори широко використовуваними в таких додатках як системи позиціонування в верстатах з ЧПУ. Крім цього, ривки різних деталей, підключених до мотору, також як і поштовхи самого мотора значно знижуються. У режимі мікрокроку, кроковий мотор може обертатися також плавно як і звичайні двигуни постійного струму .
Форма струму, що протікає через обмотку схожа на синусоїду.
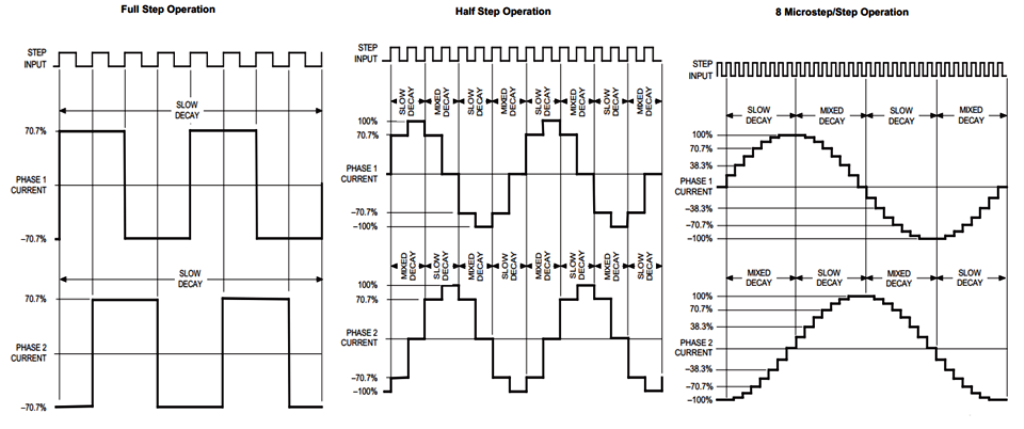
рис.3.
| Характеристика | Деталі |
|---|---|
| Принцип дії | Дискретне переміщення на фіксований кут при кожному імпульсі струму. |
| Переваги | Проста схема керування; висока утримуюча сила; немає потреби у давачі зворотного зв’язку (часто). |
| Недоліки | Небезпека «пропуску кроків» при перевантаженні; знижений момент при великих швидкостях; резонансні явища. |
| Типові застосування | 3D-принтери, плотери, CNC-машини малої потужності, офісне обладнання. |
| Точність | Зазвичай 3–5% від кроку (без зворотного зв’язку); до 0,1° з мікрокроком. |
3.2. Серводвигун та сервопривід (Servo Motor + Drive)
Серводвигун — це, як правило, синхронний двигун на постійних магнітах (PMSM) або безщітковий двигун постійного струму (BLDC) із вбудованим давачем зворотного зв’язку (зазвичай енкодером). Принципова відмінність від кроковика — замкнений контур регулювання: сервопривід постійно порівнює задане положення/швидкість/момент із виміряним і компенсує відхилення.
Архітектура сервоприводу включає кілька каскадних контурів регулювання. Зовнішній (найповільніший) контур позиції задає профіль руху і порівнює задану позицію з вихідним сигналом енкодера. Середній контур швидкості усуває відхилення швидкості. Внутрішній (найшвидший) контур струму безпосередньо керує обмотками двигуна, забезпечуючи необхідний момент. Смуга пропускання цих контурів зазвичай відноситься як 1 : 5 : 25 (позиція : швидкість : струм).
| Параметр | Кроковий двигун | Серводвигун |
|---|---|---|
| Зворотний зв’язок | Зазвичай відсутній | Обов’язковий (енкодер/резольвер) |
| Точність | Середня (без ЗЗ) | Висока (мкм і менше) |
| Момент на малих швидкостях | Дуже високий | Нормований, лінійний |
| Момент на великих швидкостях | Значно падає | Залишається стабільним |
| Реакція на перевантаження | Пропуск кроків (втрата позиції) | Генерація помилки без втрати позиції |
| Вартість системи | Нижча | Вища |
| Складність налаштування | Мінімальна | Потребує тюнінгу ПІД-регуляторів |
| Типові застосування | Низькошвидкісні, малопотужні системи | Високоточні, динамічні системи |
3.3. Типова архітектура роботи сервоприводу
Зазвичай для керуання рухом використовується цифровий інтерфейс Sercos. Розглянемо типову архітектуру такої системи.
| Рівень | Опис |
|---|---|
| ПЛК / Motion Controller | Виконує прикладну програму (IEC 61131-3), розраховує траєкторію, відправляє завдання на привід по Sercos. |
| Мережа Sercos III | Детермінована промислова мережа (Ethernet-based) з жорсткою синхронізацією. Типовий цикл: 250 мкс — 1 мс. Передає завдання позиції/швидкості та отримує стан приводу. |
| Сервоприводний підсилювач (Drive) | Перетворює завдання контролера у відповідні імпульси напруги на обмотках двигуна. Містить контури струму та швидкості. |
| Серводвигун | Синхронний двигун на постійних магнітах. Має вбудований енкодер, зазвичай мультиоборотний абсолютний, з роздільною здатністю 65536 імп/об і більше. |

рис.4.
3.4. Лінійні двигуни та пряме (Direct Drive) керування
У надточних системах (координатні вимірювальні машини, напівпровідникове виробництво) застосовують лінійні двигуни — аналог обертального синхронного двигуна з постійними магнітами, але з розгорнутим у площину статором та ротором. Перевага — відсутність механічної передачі (кулькова гвинтова пара, зубчастий ремінь), що усуває люфт, пружність та зношування. Недолік — висока вартість, необхідність точного лінійного давача (лінійна шкала) та складне керування через взаємодію з навантаженням.

рис.5.
4. ДАВАЧІ ЗВОРОТНОГО ЗВ’ЯЗКУ В СИСТЕМАХ ПОЗИЦІОНУВАННЯ
Якість системи позиціонування принципово залежить від якості зворотного зв’язку. Без точного вимірювання фактичного положення неможливо реалізувати ні точне позиціонування, ні стабільний регулятор. Розглянемо основні типи давачів положення.
4.1. Інкрементальний енкодер
Інкрементальний енкодер генерує два квадратурних сигнали (A та B, зсунуті на 90°) та нульовий імпульс (Z) за один оберт. Лічильник контролера підраховує імпульси та визначає відносне переміщення від початкової точки. Роздільна здатність визначається кількістю імпульсів на оберт (PPR) та режимом квадратурного декодування (×1, ×2, ×4).
Основний недолік — відсутність інформації про абсолютне положення після вимкнення живлення. Тому при кожному старті системи необхідно виконувати процедуру «Homing» — пошук базової точки. Типові значення: 1000–20000 PPR (до квадратурного декодування).

рис.6.
4.2. Абсолютний енкодер
Абсолютний енкодер у кожен момент часу видає код, що однозначно відповідає поточному куту вала. Однооборотний (single-turn) кодує положення в межах одного оберту. Мультиоборотний (multi-turn) додатково зберігає кількість обертів, зазвичай за рахунок автономного живлення (батарея) або спеціальних механічних лічильників.
Серводвигуни Schneider BSH, які використовуються з Lexium 32, оснащені мультиоборотними абсолютними енкодерами з роздільною здатністю 65536 (16 біт) позицій на оберт та до 65536 оборотів. Це дозволяє уникнути процедури Homing у більшості застосувань, хоча в лабораторній роботі вона все одно виконується для демонстрації принципу.
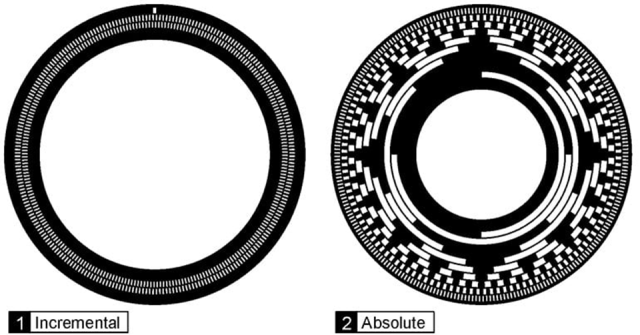
рис.7.
4.3. Резольвер (Resolver)
Резольвер — аналоговий давач, що є по суті трансформатором з обертовим ротором. Він видає два синусоїдальних сигнали (sin та cos), що залежать від кута вала. Перетворення аналогового сигналу у цифровий код виконує спеціальна мікросхема R/D (Resolver-to-Digital). Перевага перед енкодером — висока стійкість до вібрацій, ударів, температури та забруднень. Недолік — нижча роздільна здатність та потреба у додатковій схемі перетворення.
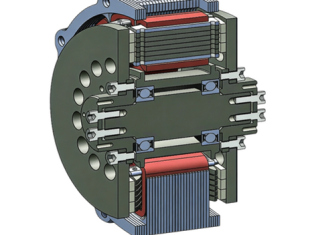
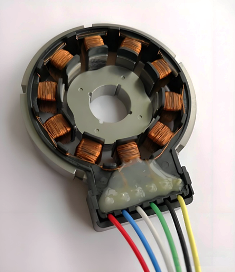
рис.8.
| Тип давача | Ключові характеристики та застосування |
|---|---|
| Інкрементальний енкодер | Простий, недорогий; потребує Homing; типова роздільна здатність 1000–20000 PPR; промислові верстати. |
| Абсолютний (one-turn) | Пам’ять положення в межах оберту; не потребує Homing після зупинки в межах оберту. |
| Абсолютний (multi-turn) | Пам’ятає повне положення після вимкнення; стандарт для серводвигунів в автоматизації. |
| Резольвер | Надійний в жорстких умовах (вібрація, температура); авіація, металургія, важке машинобудування. |
| Лінійна шкала (Linear scale) | Давач лінійного переміщення (оптичний/магнітний); пряме вимірювання без перерахунку; ЧПК, CMM. |
| Холова давач (Hall-effect) | Використовується в BLDC-двигунах для комутації; низька роздільна здатність — лише для комутації, не для позиції. |
5. ПРОФІЛІ РУХУ: ТРАПЕЦІЄПОДІБНИЙ ТА S-ПОДІБНИЙ
Одна з ключових задач планувальника руху (motion planner) — побудова оптимального профілю швидкості, що забезпечує переміщення осі між двома точками за мінімальний час без перевищення допустимих обмежень на швидкість, прискорення та ривок.
5.1. Трапецієподібний профіль (Trapezoidal Profile)
Найпростіший тип профілю складається з трьох фаз: розгін (acceleration phase), рух зі сталою швидкістю (constant velocity phase) та гальмування (deceleration phase). На графіку швидкість від часу нагадує трапецію. Прискорення при цьому є прямокутною функцією, що означає миттєву зміну прискорення (нескінченний ривок) у точках переходу між фазами.
| Фаза | Опис |
|---|---|
| Розгін | Прискорення = +a (константа). Швидкість лінійно зростає від 0 до Vmax. |
| Усталений рух | Прискорення = 0. Швидкість = Vmax = const. Може бути відсутньою при коротких переміщеннях. |
| Гальмування | Прискорення = -a (константа). Швидкість лінійно спадає від Vmax до 0. |
Переваги трапецієподібного профілю — простота розрахунку та мінімальний час позиціонування при заданих Vmax та a. Недолік — різкі зміни прискорення викликають ударне навантаження на механіку (люфти, пружні деформації), вібрації та підвищений знос.
Розрахунок параметрів трапецієподібного профілю. Час розгону: t₁ = Vmax / a. Якщо загальна відстань S < Vmax² / a (трикутний профіль без фази Vmax = const), то піку швидкість: Vpeak = √(a · S). Загальний час руху: T = Vmax/a + (S - Vmax²/a) / Vmax + Vmax/a = 2·Vmax/a + S/Vmax - Vmax/a.
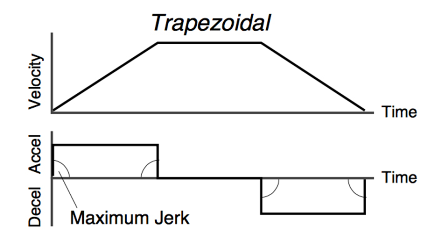
рис.9.
5.2. S-подібний профіль (S-curve Profile)
S-подібний профіль усуває недолік трапецієподібного, обмежуючи ривок (Jerk = da/dt). Це призводить до того, що прискорення не змінюється стрибкоподібно, а плавно зростає та спадає за лінійним або синусоїдальним законом. На графіку швидкості від часу фаза розгону і гальмування набуває форми літери «S».
| Сегмент | Опис |
|---|---|
| J+ (Jerk+) | Ривок = +J. Прискорення лінійно зростає від 0 до amax. Швидкість — парабола. |
| Const. Acc | Ривок = 0. Прискорення = amax = const. Швидкість лінійно зростає. |
| J– (Jerk–) | Ривок = –J. Прискорення спадає від amax до 0. Швидкість досягає Vmax. |
| Const. Vel | Vmax = const. Аналогічно до трапецієподібного. |
| Гальмування | Симетрично до розгону: J+, Const.Dec, J– сегменти. |
| Критерій порівняння | Трапецієподібний vs S-подібний профіль |
|---|---|
| Ривок (Jerk) | Трапеція: нескінченний (стрибок прискорення). S-крива: обмежений параметром Jerk. |
| Вібрації | Трапеція: значні, особливо при великих мас. S-крива: суттєво менші. |
| Знос механіки | Трапеція: вищий. S-крива: нижчий завдяки плавності. |
| Час позиціонування | Трапеція: коротший при однакових Vmax та a. S-крива: довший через додаткові сегменти. |
| Складність розрахунку | Трапеція: проста. S-крива: складніша (7 сегментів). |
| Рекомендація | Трапеція: прості механізми, малі маси. S-крива: важкі вантажі, рідини, точні системи. |
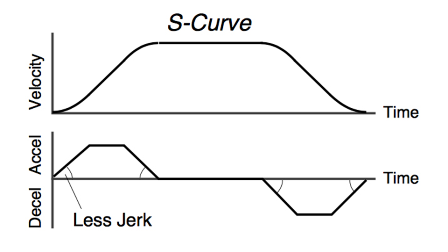
рис.10.
Також прочитайте Стандарт PLCOPEN motion control
Відео
Джерела
Матеріали для додаткового вивчення
- Chooi. AC500 V3 General Motion Control. Presentation. ABB Global Technical Support, July 2024.
- Матеріали Motion Training від ABB
- https://www.youtube.com/@abbmotion4502
- https://www.youtube.com/@abbdrives
Автори
Теоретичне заняття розробив Павло Крещенко
Feedback
Якщо Ви хочете залишити коментар у Вас є наступні варіанти:
Про проект і можливість допомогти проекту написано тут