Керування ПЧ Danfoss з використанням профілю FC
Довідкова частина
Профіль FC є основним профілем для керування ПЧ Danfoss через мережу. Аналогічно іншим профілям профіль FC передбачає два слова керування та два слова контролю:
Слова керування:
CTW- Frequency converter control word register, слово командиREF- Bus reference register
Слова контролю:
STW- Frequency converter status word register, слово стануMAV- Frequency converter main value register
Керування автоматів станів передбачає виставлення відповідних бітів в слові, без забезпечення послідовностей переходу.
Задане значення швидкості передається на перетворювач частоти у відносному значенні у %. Значення передається у вигляді 16-розрядного слова REF в діапазоні 0-16384 (0-4000 hex) що відповідає 0-100% від максимальної. Від’ємні значення форматуються з використанням доповнення 2. Фактична вихідна частота (MAV) масштабується так само, як REF.
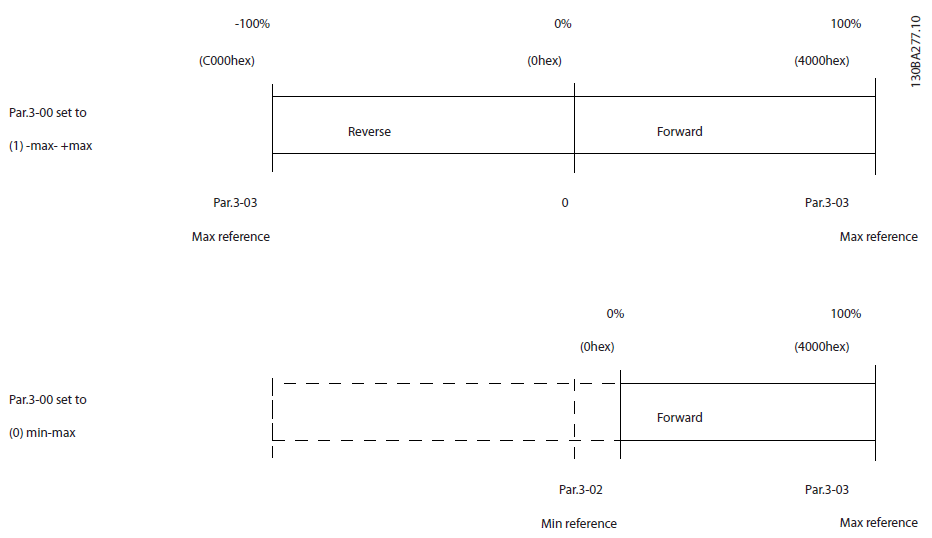
рис.1. Діапазон частот в REF та MAV
Слово команди CTW
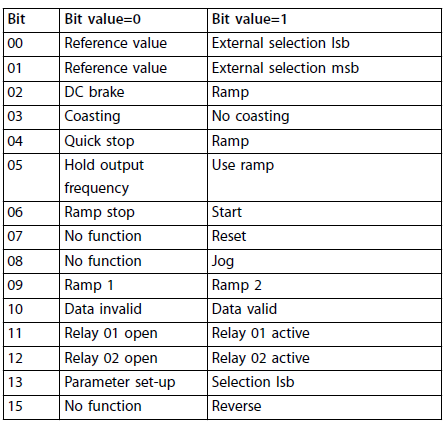
Таблиця 1. Біти слова команди
| № біта | Команда при Bit=0 | Призначення команди 0 | Команда при Bit=1 | Призначення команди 1 |
|---|---|---|---|---|
| 00 | Reference value | біт номера вибраного завдання (Біти 00 і 01 використовуються для вибору між 4 посиланнями значення, які попередньо запрограмовані в параметрі 3-10 Preset.) | External selection lsb | біт номера вибраного завдання |
| 01 | Reference value | біт номера вибраного завдання | External selection msb | біт номера вибраного завдання |
| 02 | DC brake | призводить до гальмування постійним струмом і зупинки. Встановіть гальмівний струм і тривалість у параметрі 2-01 DC Brake Current і параметрі 2-02 DC Braking Time. |
Ramp | Робота по рампі |
| 03 | Coasting | перетворювач частоти негайно відключається від двигуну (вихідні транзистори закриваються), і двигун зупиняється через самовибіг | No coasting | перетворювач частоти запускає двигун, якщо виконуються усі інші умови запуску. |
| 04 | Quick-stop | зменшує швидкість двигуна до зупинки (встановлюється в параметрі 3-81 Час швидкої зупинки). | Ramp | Робота по рампі |
| 05 | Hold output frequency | замороження поточної вихідної частототи (у Гц). Змінюйте заморожену вихідну частоту лише за допомогою цифрових входів (параметри з 5-10 Terminal 18 Digital Input до параметру 5-13 Terminal 29 Digital Input) запрограмований в [21] Speed up і [22] Slow down. Зупинка можлива тільки Bit 03 coast stop або Bit 02 DC brake або дискретними входами |
Use ramp | Робота по рампі |
| 06 | Ramp stop | Викликає зупинку та зменшує швидкість двигуна до зупинки по рампі за допомогою вибраного параметра зменшення. | Start | Дозволяє перетворювачу частоти запускати двигун, якщо виконуються інші умови запуску. Зробіть вибір у параметрі 8-53 Start Select, щоб означити, як біт 06 Ramp stop/start взаємодіє з відповідною функцією на цифровому вході. |
| 07 | No function | немає функції | Reset | Скидання помилки (trip). Скидання активується по передньому фронту даного біту (зміна логічного 0 в 1). |
| 08 | No function | немає функції | Jog | Вихідна частота означується параметром 3-11 Jog Speed [Hz] |
| 09 | Ramp1 | Рампа, 207, 208 | Ramp2 | Включить заданное время разгона/торможения, 209, 210 |
| 10 | Data invalid | Слово команди (Cotrol Word) ігнорується. Вимкніть слово команди, якщо не бажаєте використовувати його під час оновлення або читання параметрів. | Data valid | Слово команди (Cotrol Word) ігнорується. |
| 11 | Relay 01 open | Реле 01 не активовано | Relay 01 active | Реле 01 активується, якщо [36] Control word bit 11 вибрано в параметрі 5-40 Function Relay. |
| 12 | Relay 02 open | Реле 02 не активовано | Relay 02 active | Реле 02 активується, якщо [37] Control word bit 12 вибрано в параметрі 5-40 Function Relay. |
| 13 | Parameter set-up | Вибрано Set-up 1 | Selection lsb | Вибрано Set-up 2 |
| 14 | No function | немає функції | No function | немає функції |
| 15 | No function | немає функції | Reverse | Реверс, 506 |
Слово статусу STW
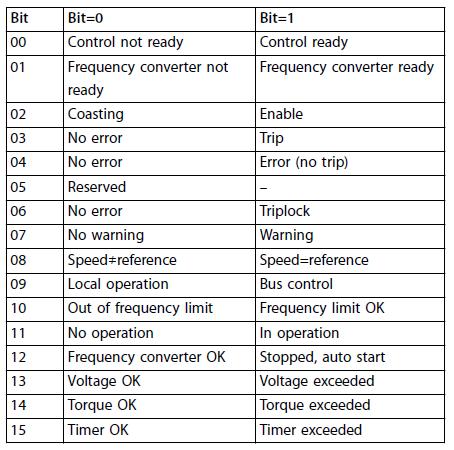
Таблиця 2. Біти слова статусу
| № біта | Значення при Bit=0 | Розшифрування 0 | Значення при Bit=1 | Розшифрування 1 |
|---|---|---|---|---|
| 00 | Control not ready | ПЧ в помилці (trip) і не готовий до роботи | Control ready | ПЧ готовий до роботи. При цьому компонент живлення не обов’язково заживлений (якщо для елементів керування є зовнішнє живлення 24 В). |
| 01 | Frequency converter not ready | ПЧ не готовий до роботи | Frequency converter ready | ПЧ готовий до роботи, однак включена команда Coasting через цифрові входи або через послідовний зв’язок. |
| 02 | Coasting | ПЧ відключився від двигуна, зупинка | Enable | Перетворювач частоти запускає двигун командою запуску |
| 03 | No error | Немає помилки Trip | Trip | ПЧ має блокуючу помилку (trip). Щоб відновити роботу, натисніть [Reset]. |
| 04 | No error | Немає помилки | Error (no trip) | ПЧ показує помилку, але не блокуючу (no trip). |
| 05 | Reserved | Reserved | ||
| 06 | No error | ПЧ не заблоковано по помилці | Trip lock | ПЧ в помилці і заблокований |
| 07 | No warning | Немає попереджень | Warning | Є попередження |
| 08 | Speed ≠ reference | Плинна швидкість не дорівнює заданій | Speed = reference | Плинна швидкість дорівнює заданій |
| 09 | Local operation | Активне місцеве керування. На панелі керування активовано [Off/Reset] або [Local] або у параметрі 3-13 Reference Site вибрано [2] Local . Неможливо керувати перетворювачем частоти через послідовний зв’язок. |
Bus control | Активно керування по системі послідовного звязку |
| 10 | Out of frequency limit | Вихідна частота досягла значення параметра 4-12 Motor Speed Low Limit [Hz] або параметра 4-14 Motor Speed High Limit [Hz] |
Frequency limit OK | Частота в межах заданих параметрів обмежень |
| 11 | No operation | Двигун не в роботі | In operation | Двигун в роботі |
| 12 | Frequency converter OK | На ПЧ немає тимчасового перегріву | Stopped, auto start | ПЧ зупиняється через перегрівання, але пристрій не має блокуючої помилки (trip) і відновлить роботу, коли тмепература нормалізується |
| 13 | Voltage OK | Напруга в нормі | Voltage exceeded | Напруга постійного струму в ланці постійного струму ПЧ занадто низька або занадто висока. |
| 14 | Torque OK | Момент в нормі (нижче параметра 4-18 Current Limit) |
Torque exceeded | Момент вище норми, заданої в параметрі 4-18 Current Limit |
| 15 | Timer OK | Таймери теплового захисту двигуна і ПЧ не перевищують 100% | Timer exceeded | Один з тамйерів теплового захисту спрацював |
Практична частина
Постановка задачі
Для практичної частини використовується наступна конфігурація
| DRIVE | Danfoss Micro Drive FC51 132F0003 |
| FIELDBUS | MODBUS RTU on RS485 |
| DRIVE PROFILE | FC |
| PLC HARD | S7 1200 + комунікаційна плата CB 1241 RS485 |
| PLC SOFT | TIA Portal |
Передбачається керування з ПЛК:
- запуск/зупинка двигуна;
- керування швидкістю в розімкнутому режимі;
Контроль роботи приводу:
- контроль режиму роботи приводу (функціонування, наявність помилки, місцевий/дистанційний);
- поточна швидкість;
Налаштування ПЧ для комунікації
У даному прикладі ми опустимо налаштування в ПЧ параметрів двигуна та інших налаштувань, що не стосуються теми. Зупинимося тільки на налаштуваннях мережі. Усі налаштування керування через послідовний порт наведені на рис.2.
Таблиця 3. Налаштування ПЧ
| Номер параметру | Значення | Призначення | |
|---|---|---|---|
| 8.02 | 1 - RS-485 | Джерело командного слова - RS-4985 | |
| 8.30 | 2 - Modbus | протокол - Modbus | |
| 8.31 | 2 - Address | адреса Веденого в Modbus | |
| 8.32 | 3 - Baudrate = 19200 | бітова швидкість 19200 | |
| 8.33 | 3 - No parity, 2 stop | контроль парності |
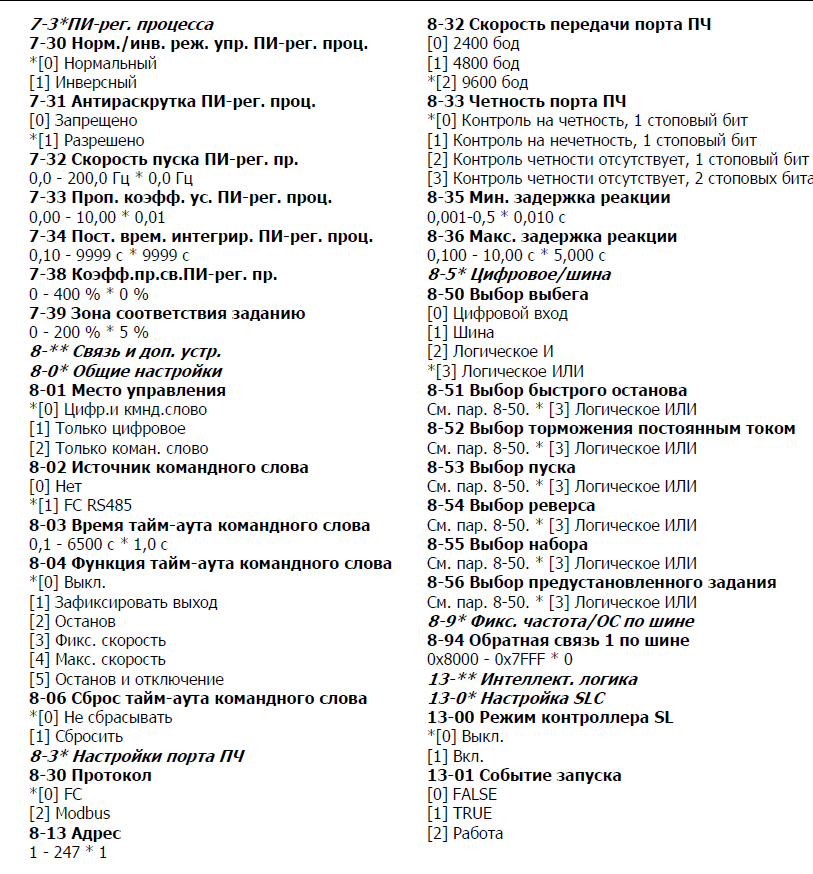
рис.2. Комунікаційні параметри ПЧ FC51 (не знайшов англійською)
Створення функціонального блока
Для керування ПЧ створимо функціональний блок DNFCTRL. Параметри вказані в таблиці 4.
Таблиця 4. Параметри ФБ DNFCTRL
| Назва | Тип |
|---|---|
| Input | |
| STW | Word |
| MAV | Int |
| START | Bool |
| SPEEDSP | Real |
| Output | |
| CTW | Word |
| REF | Int |
| SPEEDCUR | Real |
| Static | |
| cmdRamp | Bool |
| cmdQuickStop | Bool |
| cmdCoasting | Bool |
| cmdStart | Bool |
| cmdReset | Bool |
| cmdRamp2 | Bool |
| cmdRelay1On | Bool |
| cmdRelay2On | Bool |
| cmdSellsb | Bool |
| cmdReverse | Bool |
| staControlReady | Bool |
| staFreqConvReady | Bool |
| staEnable | Bool |
| staTrip | Bool |
| staError | Bool |
| staTriplock | Bool |
| staWarning | Bool |
| staSpeedEqRef | Bool |
| staBusCtrl | Bool |
| staFreqLimOk | Bool |
| staInoperation | Bool |
| staStopped | Bool |
| staVoltExceeded | Bool |
| staTorqueExceeded | Bool |
| staTimerExceeded | Bool |
Програма користувача наведена нижче.
#SPEEDCUR := INT_TO_REAL(#MAV) * 100/16384;
IF #START THEN
#cmdStart := true;
#cmdRamp := true;
ELSE
#cmdStart := false;
#cmdRamp := true;
END_IF;
#staControlReady := #STW.%X0; //00 Control NOT ready / Control ready
#staFreqConvReady := #STW.%X1; //01 frequency converter NOT ready / Frequency converter ready
#staEnable := #STW.%X2; //02 Coasting / Enable
#staTrip := #STW.%X3; //03 No error / Trip
#staError := #STW.%X4; //04 No error / Error (no trip)
#staTriplock := #STW.%X6; //06 No error /Triplock
#staWarning := #STW.%X7; //07 No warning /Warning
#staSpeedEqRef := #STW.%X8; //08 Speed≠reference /Speed=reference
#staBusCtrl := #STW.%X9; //09 "Local" operation /Bus control
#staFreqLimOk := #STW.%X10; //10 Out OF frequency limit /frequency limit OK
#staInoperation := #STW.%X11; //11 No operation /In operation
#staStopped := #STW.%X12; //12 Frequency converter OK / Stopped, auto start
#staVoltExceeded := #STW.%X13; //13 Voltage OK /Voltage exceeded
#staTorqueExceeded := #STW.%X14; //14 Torque OK /Torque exceeded
#staTimerExceeded := #STW.%X15; //15 Timer OK /Timer exceeded
#REF := REAL_TO_INT(#SPEEDSP * 16384 / 100.0);
#CTW.%X0 := false; //00 Reference value /External selection lsb
#CTW.%X1 := false; //01 Reference value /External selection msb
#CTW.%X2 := #cmdRamp; //02 DC brake /Ramp
#CTW.%X3 := NOT #cmdCoasting; //03 Coasting /No coasting
#CTW.%X4 := NOT #cmdQuickStop; //04 Quick stop /Ramp
#CTW.%X5 := #cmdRamp; //05 Hold output frequency / Use ramp
#CTW.%X6 := #cmdStart; //06 Ramp stop / Start
#CTW.%X7 := #cmdReset; //07 No function / Reset
#CTW.%X8 := false; //08 No function / Jog
#CTW.%X9 := #cmdRamp2; //09 Ramp 1 / Ramp 2
#CTW.%X10 := true; //10 Data invalid / Data valid
#CTW.%X11 := #cmdRelay1On; //11 Relay 01 open / Relay 01 active
#CTW.%X12 := #cmdRelay2On; //12 Relay 02 open / Relay 02 active
#CTW.%X13 := #cmdSellsb; //13 Parameter set-up / Selection lsb
#CTW.%X15 := #cmdReverse; //15 No function / Reverse
У програмі реалізований шаблон та найпростіше керування ПЧ командами запуску та зупинки за рампою в залежності від входу START. Усіми іншими бітами можна керувати через біти екземплярного DB.
Слова стану STW та плинного значення MAV приходять в ФБ через входи. Вони мають подаватися на вхід ФБ з фрагмента програми що забезпечує читання змінних з ПЧ. Аналогічно вихідні змінні CTW та REF , які змінюються всередині ФБ мають передаватися іншим фрагментом програми на ПЧ. Задане значення SPEEDSP в діапазоні 0-100% перетворюється у відповідне REF, а дійсне ціле значення з ПЧ MAV перетворюється у SPEEDCUR.
Реалізація основної програми
Реалізація в основній програмі передбачає виклик ФБ DNFCTRL з відповідним створеним екземплярним DB. Для реалізації обміну по мережі Modbus реалізований інший фрагмент програми, який описаний в практичному занятті Реалізація Modbus Master з використанням функції MB_MASTER для S7-1200.
#DNFFCCTRL_ROAST(STW:="IOMB".DNFROAST_RD.STW,
MAV:="IOMB".DNFROAST_RD.MAV,
START:="IO".MROAST_KV_OUT,
SPEEDSP:="IO".MROAST_SPD_OUT,
CTW =>"IOMB".DNFROAST_WR.CTW,
"REF" =>"IOMB".DNFROAST_WR."REF");
Практичне заняття розробив Олександр Пупена.
Якщо Ви хочете залишити коментар у Вас є наступні варіанти:
Про проект і можливість допомогти проекту написано тут