Профіль CiA402: теоретична частина
Профіль CiA402 розроблений організацією CAN in Automation як профіль пристрою DS-402. Він використовується як базовий прикладний профіль управління PDS в мережах CANOpen, ETHERNET Powerlink та ETHERCat. Нижче розглянемо функціонування CiA402 тільки стосовно мережі CANOpen. Слід зазначити, що використання частотних перетворювачів в мережі CANOpen не обов’язково передбачає використання профілю CiA402 (DS-402).
1. Функціональні елементи CiA402
Слова управління та статусу (Controlword та Statusword)
Автомати станів функціональних елементів управляється за допомогою керуючих слів Command (Controlword – індекс в словнику 6040h), через які передається команда, а контролюються через слова статусу Status (Statusword - індекс в словнику 6041h ).
Дані входів/виходів включають один або декілька сигналів уставок та дійсних значень для управління та контролю за приводом. Ці дані та параметри прикладних профілів зберігаються у конкретних об’єктах словника. Так наприклад для режиму управління швидкістю без зворотного зв’язку (див. рис.11.6(б)), визначені наступні об’єкти словника:
-
Command – Controlword (ID 6040h);
-
Status – Statusword (ID 6041h);
-
Velocity set point – Target velocity (ID 6042h);
-
Actual velocity – velocity actual value (ID 6044h).
Device Control FE
Автомат станів може перебувати в режимі No Fault (3-й біт Statusword = 1) або No Fault (3-й біт Statusword = 0). Скидання аварії проводиться командою Fault Reset (7-й біт Controlword=1). Поведінка приводу в кожному стані визначається в самому пристрої, наприклад при конфігуруванні. Після скидання аварії, привод переводиться в стан Ready To Switch On.
Communication FE
Для CiA402 визначені наступні комунікаційні стани: Operational та Pre-operational або Stopped. Робота автомату станів комунікаційного функціонального елементу залежить від промислової мережі, на якій працює привод з даним профілем. Для CANOpen діаграма станів NMT-веденого наведена в 9-му розділі.
Basic Drive FE
Автомат станів профілю CiA402 наведений на рис.11.15. Стан not operating, який визначений стандартом IEC 61800-7-1, в профілі CiA402 складається з декількох під станів.
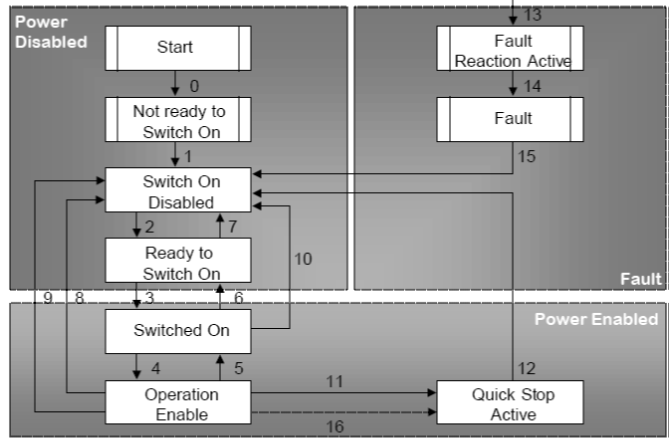
Рис.11.15. Автомат станів для профілю CiA-402
Автомату доступні такі стани:
-
Not ready to Switch On – стадія ініціалізації привода, комунікації недоступні;
-
Switch On Disabled – завершення стадії ініціалізації, силова частина приводу неактивна, подача живлення на неї неможлива, на двигун не подається живлення, доступна параметризація через комунікації;
-
Ready to Switch ON – очікування подачі живлення на силову частину приводу, на двигун не подається живлення, доступна параметризація через комунікації;
-
Switched On – подане живлення на силову секцію приводу, на двигун не подається живлення, доступна параметризація через комунікації;
-
Operation Enabled – нормальний операційний режим роботи, помилок не виявлено, на двигун подається живлення, доступна параметризація через комунікації за винятком конфігураційних даних силової частини;
-
Fault Reaction Active – виявлення помилки на приводі та її обробка; функції управління двигуном доступні;
-
Fault – стан помилки, привод заблокований, на двигун не подається живлення;
-
Quick Stop Active – стан швидкої зупинки двигуна.
Стан приводу визначений Statusword, а переходи між станами можуть відбуватися за внутрішніми подіями, або по команді, визначеній в Controlword. В наступній таблиці 11.4 наведені значення бітів слова статусу у різних станах.
Таблиця 11.4 Значення бітів слова статусу
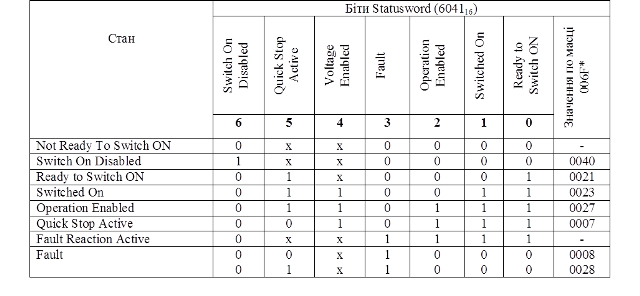
x – невизначений стан
- значення в шістьнадцятковому форматі, наведене по масці 006F
У таблиці 11.5 наведені команди для переходу між станами та біти слова Controlword, які їм відповідають.
Таблиця 11.5 Команди для переходу між станами
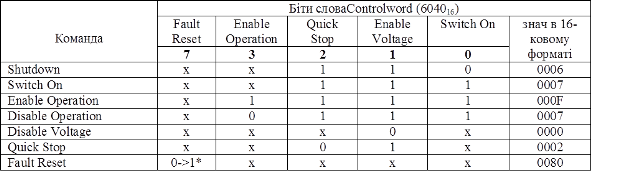
* - по передньому фронті сигналу
У таблиці 11.6 наведені події та команди, по яким відбувається перехід між станами. Номер переходу показаний на рис. 11.5
Таблиця 11.6 Події та команди, по яким відбувається перехід між станами
| № пере- ходу | Зі стану | На стан | Подія | Реакція на подію |
|---|---|---|---|---|
| 0 | Start | Not Ready To Switch ON | Запуск привода | Привод проходить самодіагностику та стартову ініціалізацію |
| 1 | Not Ready To Switch ON | Switch On Disabled | позитивний резуль-тат ініціалізації | Активація комунікації та відображення процес них даних |
| 2 | Switch On Disabled | Ready to Switch ON | команда Shutdown | перехід в наступний стан |
| 3 | Ready to Switch ON | Switched On | команда Switch On | силова секція приводу включається |
| 4 | Switched On | Operation Enabled | команда Enable Operation | перехід в операційний режим: дос-тупні функції управління двигуном |
| 5 | Operation Enabled | Switched On | команда Disable Operation | операційний режим відключається |
| 6 | Switched On | Ready to Switch ON | команда Shutdown | силова секція приводу відключається |
| 7 | Ready to Switch ON | Switch On Disabled | команда Quick Stop | перехід в наступний стан |
| 8 | Operation Enabled | Ready to Switch ON | команда Shutdown | негайне відключення силової секції та напруги з двигуна |
| 9 | Operation Enabled | Switch On Disabled | команда Disable Voltage | негайне відключення силової секції та напруги з двигуна |
| 10 | Switched On | Switch On Disabled | команда Disable Voltage або Quick Stop | негайне відключення силової секції та напруги з двигуна |
| 11 | Operation Enabled | Quick Stop Active | команда Quick Stop | виконується швидка зупинка двигуна |
| 12 | Quick Stop Active | Switch On Disabled | швидка зупинка виконана або команда Disable Voltage | силова секція приводу відключається |
| 13 | Всі стани | Fault Reaction Active | помилка на приводі | виконання дії відповідно до типу помилки |
| 14 | Fault Reaction Active | Fault | обробка помилки закінчена | функції управління двигуном недоступні, силова секція може відключитися |
| 15 | Fault | Switch On Disabled | команда Fault Reset | зняття помилкового стану у випадку відсутності помилок, біт команди Fault Reset повинен обнулитись з контролеру |
| 16 | Quick Stop Active | Operation Enabled | команда Enable Operation | активуються функції управління двигуном |
2. Операційна робота приводів CiA-402 в режимі управління швидкістю
У CiA-402 доступні всі прикладні режими, описані в IEC 61800-7-1. Режим управління швидкістю без зворотного зв’язку має назву Profile Velocity mode. Для цього режиму в операційному режимі запуск двигуна відбувається за допомогою команди No Halt (8-й біт Controlword=0), зупинка – Halt (8-й біт Controlword=1). Задана швидкість обертання задається об’єктом Target velocity (6042h), а контролюється об’єктом – Velocity actual value (6044h). Контроль за роботою двигуна в операційному режимі проводиться також додатковими бітами статусу, які є опціональними:
-
Target Reached (біт 10) – при Halt=1, 0 означає, що двигун зупиняється, 1 – двигун зупинився; при Halt=0, 0 означає, що швидкість не досягнула уставки, 1 – швидкість досягнула уставки;
-
Speed (біт 12) – якщо 0 – швидкість не дорівнює нулю, 1 – швидкість дорівнює нулю.
Загальний список бітів слова команди для режиму управління швидкістю наведений у таблиці 11.7
Таблиця 11.7 Біти слова команди для режиму управління швидкістю
| назва Command IEC 61800-7 | назва CiA-402 | біт Controlword | пояснення |
|---|---|---|---|
| Switch ON | 0 | =1, включення силової секції приводу | |
| Enable Voltage | 1 | =0, негайне відключення силової секції та напруги з двигуна | |
| Quick Stop | 2 | =1, швидка зупинка двигуна | |
| OPERATE | Enable Operation | 3 | =1, переведення в операційний режим |
| 4 | зарезервовані | ||
| 5 | зарезервовані | ||
| 6 | зарезервовані | ||
| RESET FAULT | Fault Reset | 7 | скидання помилок |
| Halt | 8 | зупинка двигуна | |
| 11-15 | призначення залежить від виробника |
Загальний список бітів слова статусу для режиму управління швидкістю наведені в таблиці 11.8.
Таблиця 11.8 Біти слова статусу для режиму управління швидкістю
| назва STATUS IEC 61800-7 | назва CiA-402 | біт Statusword | пояснення |
|---|---|---|---|
| Ready to Switch ON | 0 | =1, готовий до подачі живлення на силову частину приводу | |
| Switched On | 1 | =1, силова частина приводу підключена до живлення | |
| Operating | Operation Enabled | 2 | =1, знаходиться в операційному режимі |
| Faulted | Fault | 3 | =1, є активна помилка |
| Voltage Enabled | 4 | =1, активність обробки команди Disable Voltage | |
| Quick Stop Active | 5 | =0, відбувається швидка зупинка двигуна | |
| Switch On Disabled | 6 | =1, не готовий до подачі живлення на силову частину приводу | |
| Warning | Warning | 7 | =1, є попереджувальні повідомлення |
| 8 | призначення залежить від виробника | ||
| Remote control | Remote | 9 | =1, доступне управління з CANOpen, =0 – управління з мережі недоступне |
| Target Reached | 10 | залежить від HALT: двигун зупиняється/зупинився або швидкість рівна/нерівна уставки | |
| Speed | 12 | =1, швидкість дорівнює нулю =0, швидкість не дорівнює нулю |
Приклад 11.2. CiA-402. Написання програми для роботи ПЛК TSX Premium з ЧПР ATV71.
Завдання. Розробити конфігурацію та програму користувача в пакеті PL7 для управління (задана частота) та контролю (плинна частота, струм двигуна, напруга двигуна, аварії, попередження) частотним перетворювачем ATV 71 відповідно до задачі з прикладу 9.7.
Рішення. Частотні перетворювачі Altivar (Schneider Electric) підтримують профіль CiA-402. Для управління ЧПР створимо функціональний блок на мові ST з назвою PDS_CTRL (рис.11.16). Вхідними параметрами блоку є Status1 – куди передається слово статусу, Start1 – команда на запуск двигуна, Command1 – слово команди (вхід/вихід).
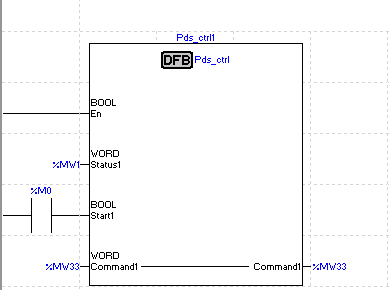
Рис.11.16. Використання функціонального блоку PDS_CTRL для управління ЧПР
На рис.11.17 показаний автомат станів для даних частотних перетворювачів Altivar, який не відрізняється від стандартного, що показаний на рис.11.15. Відмінність заключається в позначенні Statusword як ETA, а Commandword як CMD.
Програма управління частотним перетворювачем з використанням Status1 зображена на рис.11.18. Згідно прикладу 9.7, ControlWord знаходиться в %MW33, StatusWord – в %MW1, задана швидкість обертання TargetVelocity в %MW34, дійсна ControllEffort – в %MW2. Відповідно інші параметри для контролю знаходяться в змінних %MW3-%MW7. Змінна %M0 буде запускати/зупиняти двигун.

Рис.11.17. Автомат станів для профілю CiA-402 в ЧПР Altivar
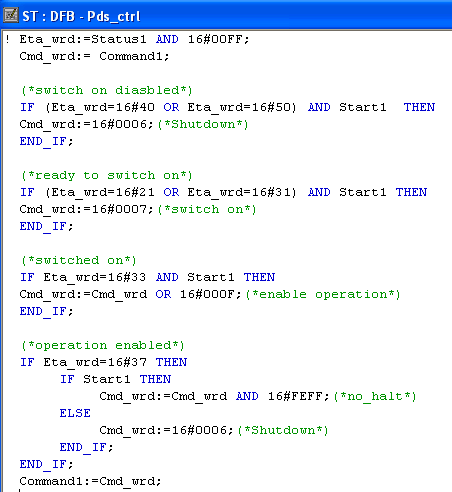
Рис.11.18. Лістинг програми функціонального блоку PDS_CTRL у середовищі PL7
Контрольні запитання
-
Прокоментуйте функціонування профілю CiA402 в контексті функціональних елементів. Які основні відмінності даної реалізації від стандартної МЕК 61800-7-1? Яка назва профілю CiA402 в CANOpen?
-
Як реалізуються в CiA402 змінні COMMAND та STATUS, визначені в МЕК 61800-7-1? З якими мережами використовується даний профіль?
-
Прокоментуйте схему функціонування автомату станів базових функціональних елементів для профілю CiA402.
-
Прокоментуйте схему функціонування операційної роботи приводу в режимі управління швидкістю для профілю CiA402.
Теоретичне заняття розробив Олександр Пупена.